プロジェクトを1.7.0バージョンへアップグレードする方法
Mech-Vision 1.7.0バージョンでは ソリューション 機能が追加され、新しいソリューションファイル構造が生成されたため、過去バージョンのMech-Visionプロジェクトは使用する前に変換を行う必要があります。
1.7.0バージョンにアップグレード後、本節を参照してプロジェクトの変換を完了してください。
アップグレード概要
| プロジェクト | 変換方法 | アップグレード後の操作 |
|---|---|---|
標準インターフェースまたはAdapter通信を使用し、Mech-Visionプロジェクトのみで、ビジョンポイントを取得 |
Mech-Visionプロジェクトをソリューションに変換し、Mech-Visionでロボット通信を再設定します。
|
|
Mech-Vizを使用して簡単な経路計画の実行と取得 |
Mech-Visionソリューションが要件を満たすことができるかどうかを評価するために、Mech-Mind株式会社にお問い合わせください。
|
|
Vizティーチングを使用 |
従来のソフトウェア使用方法(Mech-Center + Mech-Vision + Mech-Viz)や操作方法と変わりません。
|
|
Mech-Vizを使用して複雑なタスク(混載パレタイジング、複数把持・配置、複雑な経路生成など)を実行 |
アップグレード後の操作
Mech-Visionプロジェクトをソリューションに変換
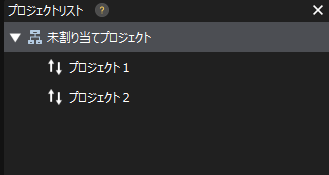
割り当てられていないMech-Visionプロジェクトを番号でソリューションに割り当てます。
| プロジェクトがソリューションに割り当てられていない場合、カメラキャリブレーション機能は使用できません。 |
1 |
Mech-Visionでプロジェクトを元のプロジェクト番号順に開きます。
|
|
2 |
をクリックします。
|
|
3 |
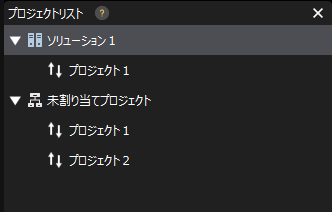
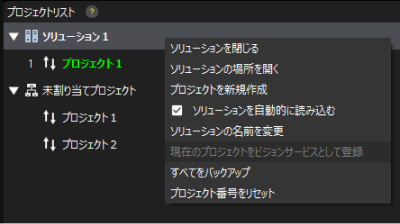
ソリューション名を右クリックし、 ソリューションを自動的に読み込む にチェックを入れます。 |
|
4 |
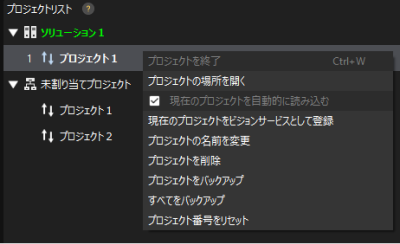
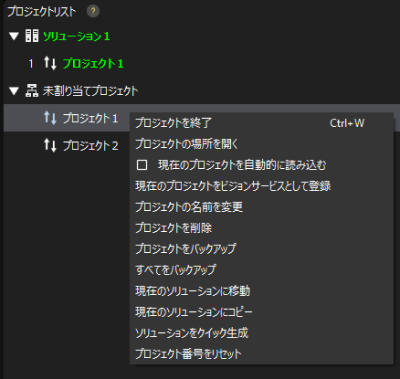
プロジェクト1 を右クリックし、 プロジェクトを削除 をクリックします。 |
|
5 |
未割り当てのプロジェクトを右クリックし、 現在のソリューションに移動 をクリックします。
|
|
6 |
プロジェクト番号が元のプロジェクト番号と一致していることを確認します。
|
|

ロボット通信設定
Mech-Visionでロボット通信設定を行います。以下の操作を始める前に、Mech-Centerが起動していないことと、Mech-Visionが単独で起動していることを確認してください。
-
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
-
ロボットを選択 のドロップダウンリストで、「適応可能なロボット」を選択します。
-
ロボット型番を選択 をクリックし、ロボットライブラリから現在のプロジェクトに使用したロボットを選択します。
-
次へ をクリックし、通信設定の画面に入ります。
-
現在のプロジェクトの通信設定に応じて、インターフェースタイプ、通信プロトコル、IPアドレスなどを設定します。
-
適用 をクリックすると、インターフェースサービスが起動されます。また、対応するログがログバーに出力され、ツールバーの「インターフェースサービス」がオンになります。
PC起動時のソフトウェア自動起動を変更
Mech-Centerで「PC起動時にMech-Centerを自動的に実行」のチェックを外し、Mech-Visionで「PC起動時にMech-Visionを起動」にチェックを入れます。
-
Mech-Centerを起動し、 をクリックします。
-
PC起動時にMech-Centerを自動的に実行 のチェックを外します。
-
保存 をクリックし、Mech-Centerを終了します。
「PC起動時にMech-Visionを起動」を有効にします。
-
Mech-Visionを起動し、 をクリックします。
-
PC起動時にMech-Visionを起動 にチェックを入れ、 OK をクリックします。
ステップ「経路計画」をMech-Visionプロジェクトに追加
Mech-Visionプロジェクトにステップ「経路計画」を追加し、ロボットの動作経路を計画します。
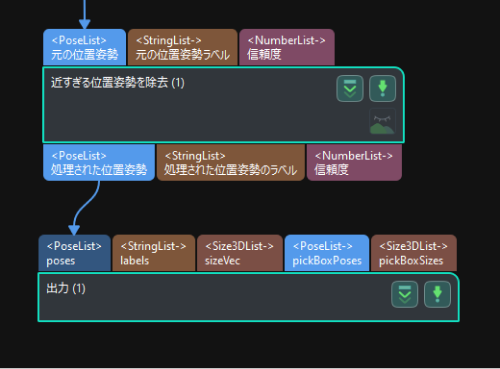
下図のようなプロジェクトを例として説明します。
-
ステップライブラリから「経路計画」を検索し、それをプロジェクト編集エリアにドラッグします。
-
「出力」のステップパラメータで「ポートタイプ」を「事前定義済み(ロボット経路)」に設定します。
-
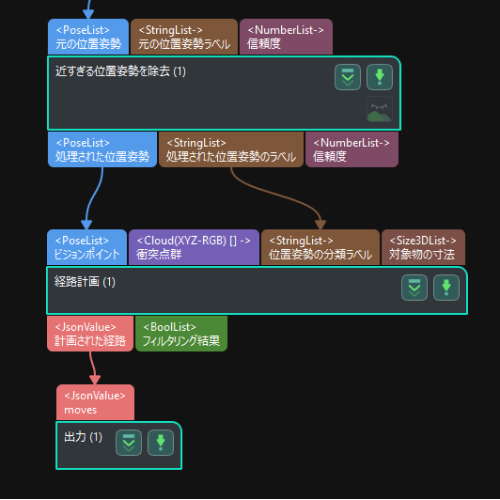
下図を参照してポートをつなぎます。
-
「経路計画」ステップパラメータで 経路計画設定ツールを開く をクリックします。
-
「経路計画設定ツール」を参照して、ロボットの動作経路計画を完了します。
ロボットのインターフェースプログラムの読み込み
ロボットのインターフェースプログラムを読み込みます。
-
ロボット通信設定で対応するロボットブランドを選択した後、通信設定画面で プログラムフォルダを開く をクリックします。表示されるフォルダには、標準インターフェースのプログラムファイルと把持のサンプルプログラムが格納されています。
-
標準インターフェース通信 を参照してプログラムの読み込みを行います。