仮想空間
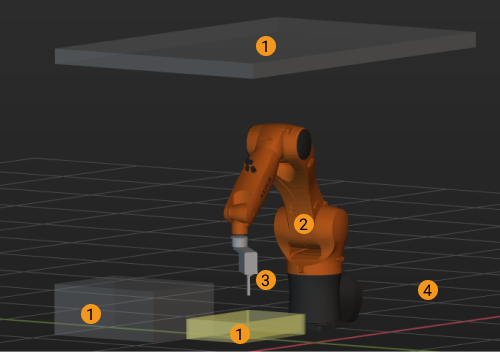
仮想区間では、シーンの物体とロボットハンド、対象物モデル、ロボットの運動経路、把持位置姿勢、衝突などが表示されます。また、ここでシーンの物のモデルをドラッグすることもできます。
基本的な操作
以下の操作により仮想空間のディスプレイを調整します。
| 視点を回転する | マウスの左ボタンを押したままドラッグする |  |
|---|---|---|
視点を切り替える |
マウスの右ボタンをクリックしてショートカットメニューで選択する |
|
視点を並進する |
マウスのホイールを押したままドラッグする |
|
拡大・縮小 |
ホイールを回す |
|
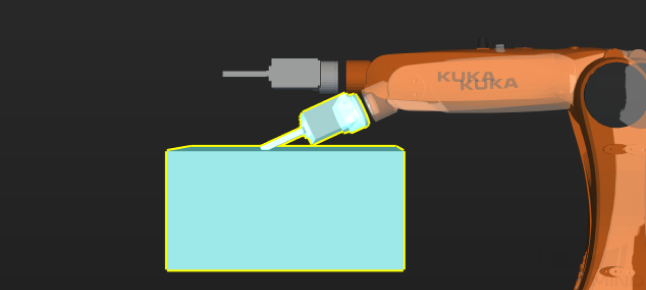
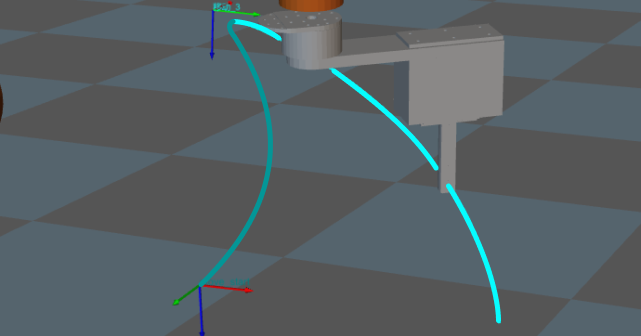
運動経路の表示
ロボット実機を制御する時も、仮想ロボットの運動経路をシミュレートする時も、これからロボットが実行する経路が仮想空間に表示されます。 経路をシミュレートすることでより合理的な動作経路を計画することができます。
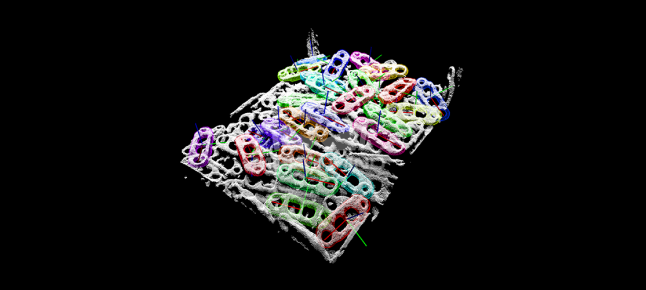
点群と把持点の表示
ビジョンサービスによって取得した結果が仮想空間に表示されます。 普通、完全なビジョン結果には、カメラでキャプチャした対象物とシーンの点群、対象物の位置姿勢、対象物の番号、対象物の特徴を表示するラベルが含まれます。