点のフィルタリング

パラメータの説明
点のフィルタリング方法
調整説明:点群の点を除去する方法は二つあり、実際のニーズに応じて選択してください。
-
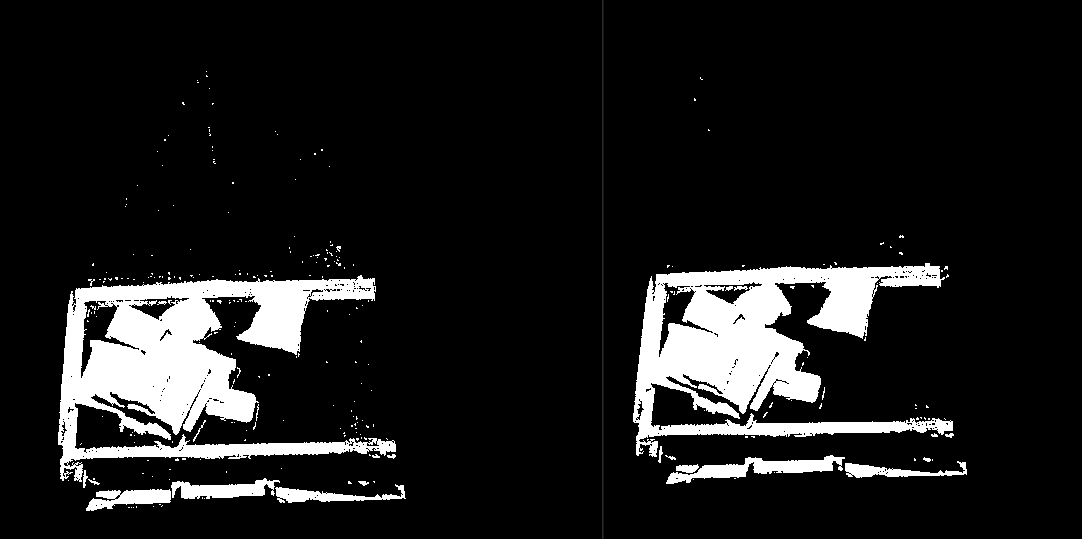
StatisticalOutlierFilter :統計フィルター、指定したパラメータによって範囲を超えた点を、この方法で除去します。下図に示すように、明らか外れ値がある場合にこの方法を使用します。
-
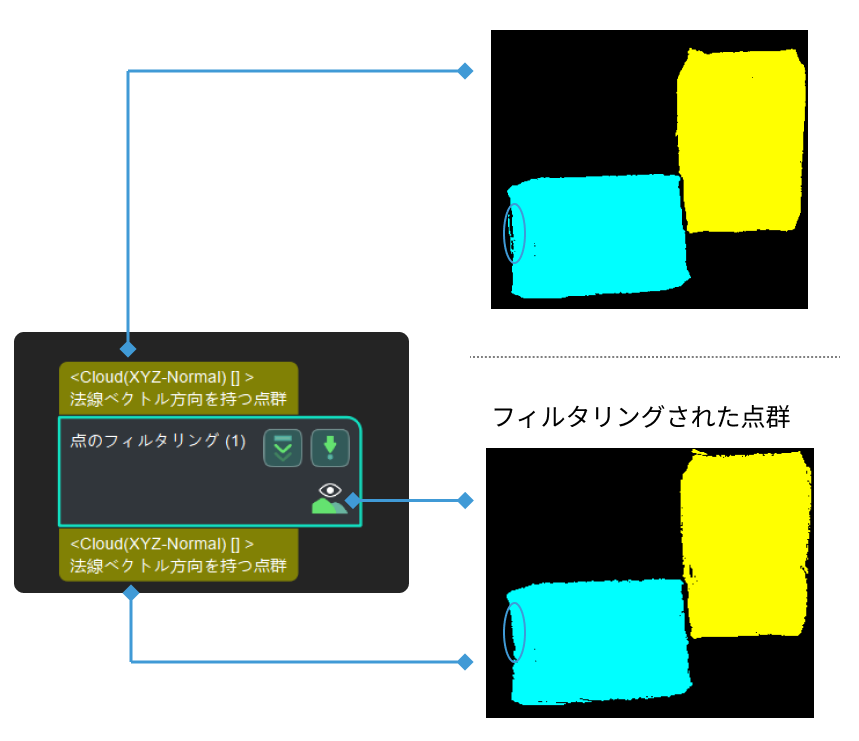
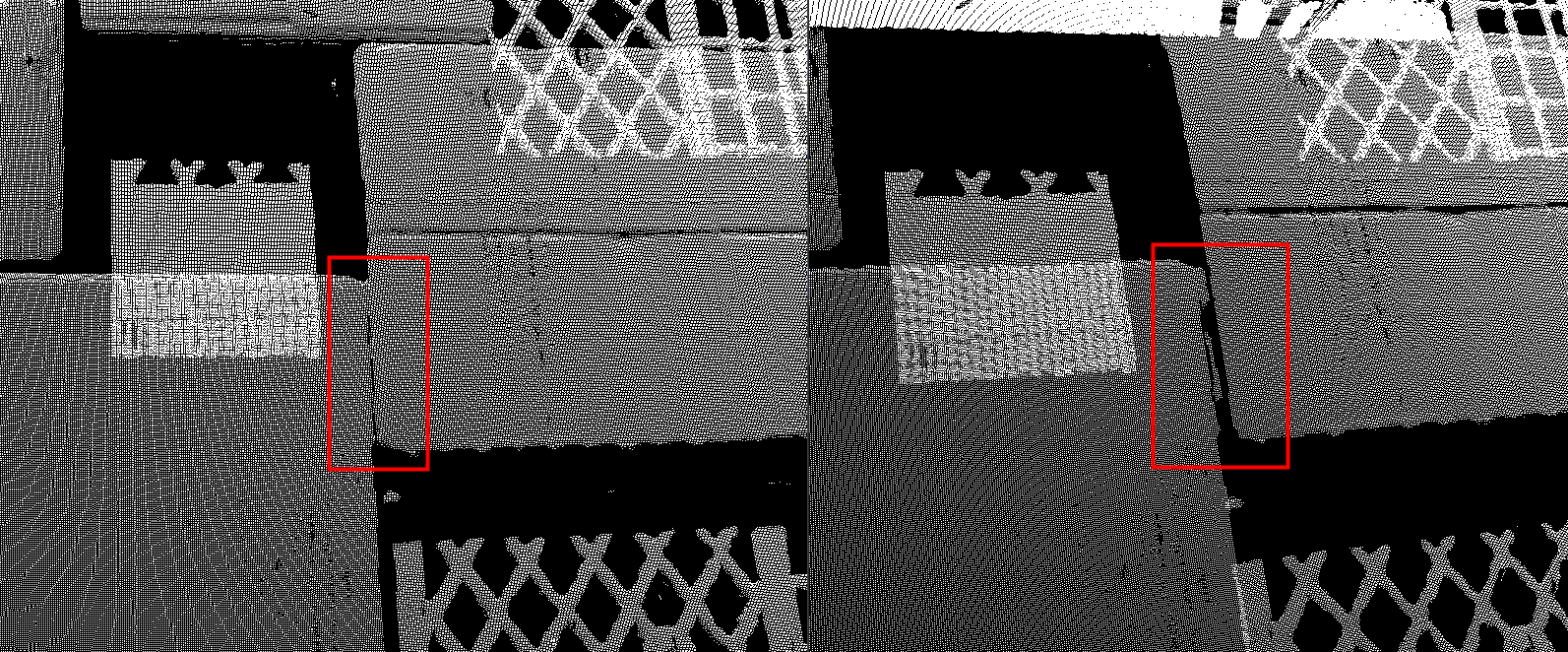
NormalsFilter :法線ベクトルフィルター、指定した基準方向によって、点群の各点と基準方向との角度を計算します。範囲を超えた点は除去されます。下図の赤枠に示すように、点群を階層化する必要があり、付着を回避する場合に使用されます。
StatisticalOutlierFilter
- 最近隣接点の数
-
初期値:30
調整説明:このパラメータは毎回検索する付近の点の数を調整します。値が大きいほど平均距離を計算するために使用される隣接点は多くなり、範囲も広くなります。
- 標準偏差乗数
-
初期値:2
調整説明:このパラメータはしきい値判断条件の中に標準偏差の乗数を調整します。値が小さいほどしきい値は低くなり、保持される点も少なくなります。ただし、点の数が少なくなったら、情報も少なくなります。
NormalsFilter
基準方向
- ロボットのZ軸を使用
-
初期値:チェックを入れない
調整説明:このパラメータは、カメラにあるロボットのZ軸を基準方向とするかどうかを決めます。チェックを入れれば、 基準方向X/Y/Z値 は全部無効になります。
- 基準方向のX値
-
初期値:0
調整説明:このパラメータは、法線ベクトルをフィルタリングするための基準軸を設定するために使用されます。XとY、Zの三つの値が一つのベクトルになり、基準軸の方向を設定します。ロボットのZ軸を使用 にチェックを入れたら、三つの値は全部無効になり、ロボットのZ軸を基準軸とします。
- 基準方向のY値
-
初期値:0
調整説明:基準方向のX値 と同様な方法で設定します。
- 基準方向のZ値
-
初期値:-1
調整説明:基準方向のX値 と同様な方法で設定します。
角度しきい値の設定
- 最小角度差
-
初期値:0
調整説明:このパラメータは点をフィルタリングするプロセスに角度差の下限を調整し、単位は°です。点の法線ベクトルと基準ベクトルとの角度差がこの値より小さい場合に、点は除去されます。
- 最大角度差
-
初期値:90
調整说明:このパラメータは点をフィルタリングするプロセスに角度差の上限を調整し、単位は°です。点の法線ベクトルと基準ベクトルとの角度差がこの値を超えた場合に、点は除去されます。