モデルエディタ
本節ではモデルエディタとその使用について説明します。
概要
Mech-Viz で使用するロボットハンド衝突モデルは、凸多面体(凸包)で構成される obj でなければなりません。モデルエディタを使用してロボットハンドモデルの凸多面体を作成し、obj 形式に変換することができます。 また、ロボットハンドモデルの座標系を再定義することやモデルを stl 形式としてエクスポートすることもできます。
凸多面体モデルを作成する
以下の手順を実行して、stl、stp、step、無効な obj モデルを凸多面体(凸包)で構成される obj モデルに変換します。
「座標系の設定」と「凸多面体の作成」を動画で説明します。
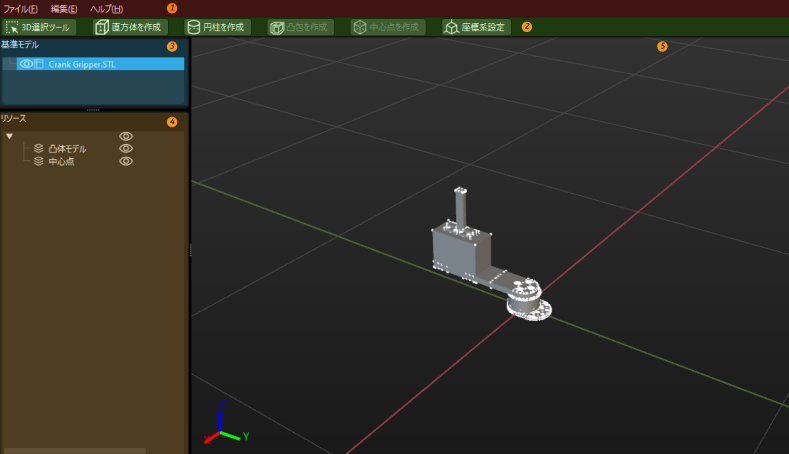
基準モデルをインポートする
モデルエディタにインポートできる基準モデルの形式:stl、stp、step、obj 。
以下のいずれかの手順を実行して基準モデルをインポートします。
-
をクリックして基準モデルを選択します。
-
基準モデルをモデルエディタウィンドウにドラッグします。
モデルの実際の寸法に基づいて「単位」を選択して OK をクリックします。
| 「モデルを読み込めませんでした。」というメッセージが表示されたら、STEP/STP ファイル有効性の判断を参考してモデルファイルをチェックしてください。 |
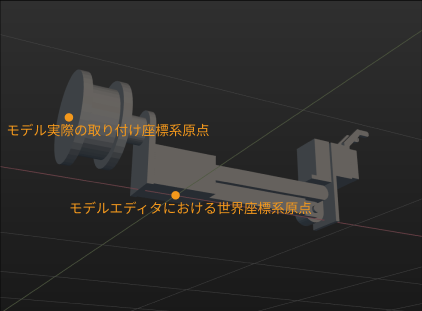
座標系を設定する
モデルエディタの世界座標系とモデルの実際の取り付け座標系とは一致しない場合、座標系を設定する必要があります。一致する場合はこの部分の説明を読まずに凸多面体を作成するから実行してください。
座標系を設定するには、新しい原点を設定し、または軸の方向を調整する必要があります。
新しい座標原点を設定する
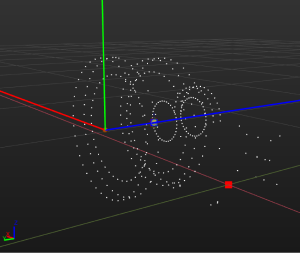
モデルの頂点を囲み、これらの頂点を基準に中心点を指定します。さらに、この中心点またはモデルの頂点を座標原点に設定します。
以下では、中心点の作成を例として説明します。
「基準モデル」パネルでモデルを選択する。
|
|
中心点を作成をクリックする。 |
|
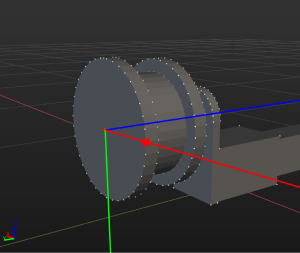
座標系設定をクリックする。
|
|

お使いのモデルは頂点を座標系原点として使用できる場合、以下の手順を実行してください:
-
座標系設定をクリックします。
-
パラメータパネルで座標系原点の右の選択をクリックします。
-
3D 編集エリアで中心点を選択します。
|
軸の方向を調整する
前の手順を実行したあと座標系の軸の方向が正しい場合は調整する必要はありません。正しくない場合は、中心点またはモデル頂点を使用して調整することができます。以下の手順を実行します。
中心点を選択のチェックを外す
|
|
パラメータパネルで中心点を選択をチェックする
|
|
中心点を選択のチェックを外す
|
|
OK をクリックする
|
|

凸多面体を作成する
Mech-Viz では、ロボットハンドの衝突モデルは凸多面体で構成されたものでなければなりません。基準モデルの形に近づけて凸多面体を作成してください。
凸多面体を作成するとき、3D 選択ツールでモデル全体を囲んで作成したりしないでください。ロボットハンドをいくつかの部分に分けて各部分ずつ多面体を作成してください。 下図に示すモデルを、11 の部分に分けて多面体を作成することができます。
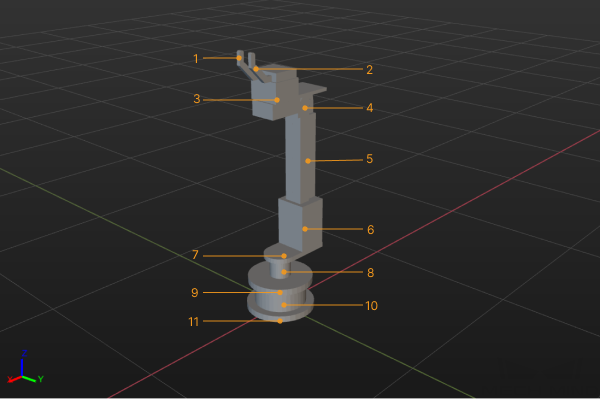
詳しく説明すると:
-
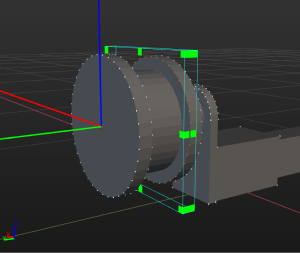
基準モデルパネルでモデルを選択してから 3D 選択ツールをクリックします。
-
3D 選択直方体を調整し、いずれかの部分の頂点を全部囲みます。凸包を作成をクリックします。
-
11 の部分の凸包を全部作成するまでステップ 2 を繰り返します。
-
基準モデル名の左の
 をクリックして基準モデルを非表示し、凸多面体だけを表示します。
をクリックして基準モデルを非表示し、凸多面体だけを表示します。
|
プロジェクトのファイルを保存する
モデルを再編集するために、以下の手順を実行してモデルを m3d 形式として保存します。
-
をクリックします。
-
保存場所を選択してファイル名を入力します。
-
保存をクリックします。
編集後のモデルをエクスポートする
以下の手順を実行して編集後のモデルを obj 形式として保存します。
-
をクリックします。
-
保存場所を選択してファイル名を入力します。
-
保存をクリックします。
モデルをエクスポートしてからメインインターフェイスのにこのモデルを追加し、で衝突モデルの設定を行うことができます。
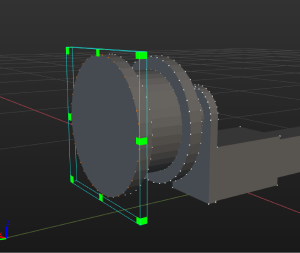
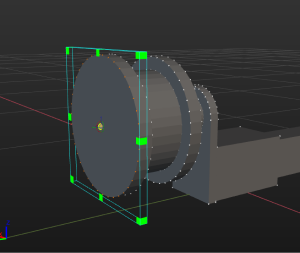
3D 選択直方体の使用ガイド
|
基準モデル名を選択してから左の |
3D 選択ツールをクリックすると 3D 選択直方体が表示され、調整してモデル頂点を囲みます。以下のいずれかの方法で 3D 選択直方体の寸法と位置を調整できます。
-
3D 編集エリアで調整する:
-
Ctrl を押したまま 3D 選択直方体の頂点をクリックしてドラッグすると直方体の寸法が変更されます。
-
Ctrl を押したまま 3D 選択直方体の表面をクリックしてドラッグすると直方体の位置が変更されます。
-
-
パラメータパネルで調整する:
-
3D 選択ツールのパラメータ値を調整して寸法を変更します。
-
中心、回転パラメータ値を調整して位置を変更します。
-
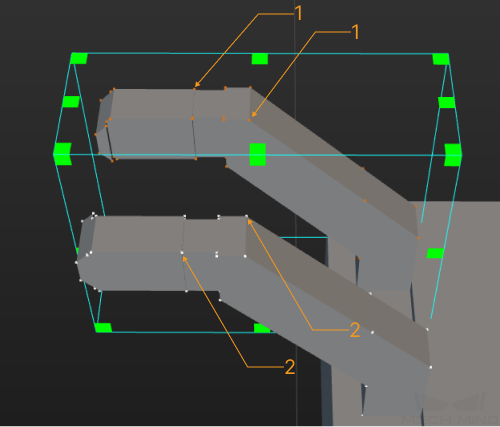
1 囲まれているモデル頂点。2 囲まれていないモデル頂点
直方体/円柱を作成する
3D 選択ツールを使用して凸包を作成するほか、直方体または円柱を作成してロボットハンドの一部分を囲むこともできます。
直方体の作成を例として説明します(円柱の作成はほぼ同じです)。
-
直方体を作成をクリックします。
-
表示されたウィンドウでカスタマイズの物体名を入力し、寸法を大まかに調整してから OK をクリックします。
-
作成した直方体は 3D 編集エリアの座標系原点にあります。Ctrl を押したままドラッガーをクリックして直方体を適切な位置にドラッグします。
-
直方体モデルをダブルクリックすると凸多面体の設定ウィンドウが表示されます。それが対象部分を覆うように寸法と位置姿勢を細かく調整します。
