基本概念
ソリューションとプロジェクト
ソリューションとは、ビジョンソリューションを実現するために必要なロボットとの通信・ビジョン処理・経路計画などの機能設定とデータの集りのことです。
Mech-Vision プロジェクトは、取得された画像データに基づいて一連のビジョン処理を行い、ビジョン結果を出力します。
Mech-Viz プロジェクトは、Mech-Vizで作成するロボット動作経路の計画プロジェクトです。Mech-Vision から出力されたビジョン処理の結果に基づいて衝突を回避するロボット移動経路を生成します。
Mech-Vision と Mech-Viz プロジェクトが連結して構成するソリューションにより、ロボットの 3D ガイドを実現します。1つのソリューションには複数の Mech-Vision プロジェクトを含めることが可能ですが、Mech-Viz プロジェクトは最大1つまでです。
Mech-Viz 2.0.0バージョンから、Mech-Vizプロジェクトは必ず「ソリューション」に割り当てる必要があります。これにより、ロボットの経路計画と動作制御が可能になります。単独での使用はできません。操作に関する詳しい説明は、ソリューションとプロジェクトをご参照ください。
| 特に説明がない限り、Mech-Viz ユーザーズマニュアルで言及される「プロジェクト」は Mech-Viz プロジェクトのことです。 |
リソース
リソースとは、ロボットやロボットハンド、対象物、シーンの物体など、プロジェクトを構築する基本要素を指します。
ロボット |
Mech-Viz において、「ロボット」とは産業用の多関節ロボットまたはトラスロボットのことです。 |
ロボットハンド |
ロボットが作業を実行させるために設計され、フランジに取り付けられる装置です。例えばグリッパや吸着ハンドなどが挙げられます。 |
対象物 |
ロボットハンドの作用対象を指します。例えば段ボール箱や金属部品、接着剤塗布または溶接が必要な部品などが挙げられます。 |
シーンの物体 |
ロボット実機が動作する空間にある物体です。ロボットの安全柵、コンテナ、パレット、カメラ、カメラブラケットなどがあります。 |
位置姿勢
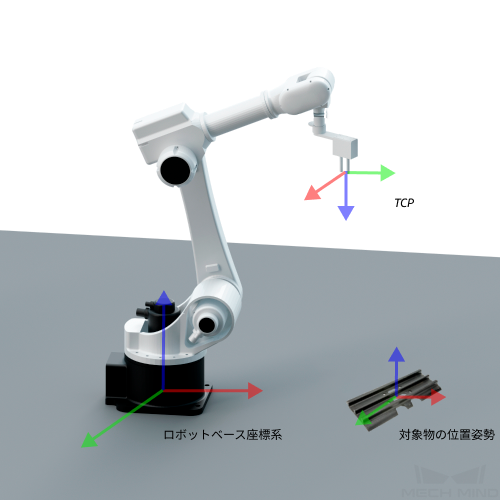
TCP(Tool Center Point、ツールセンターポイント)
ロボットハンド先端の点がロボットフランジに対する位置姿勢のことです。
対象物把持などを実行する場合、ロボットをある点に移動するのは、TCP をこの点に移動することです。
(対象物)把持点(把持位置姿勢)
対象物には複数の把持点があることがあります。把持点は Mech-Vision から取得されます。 対象物を把持する時、ロボットは TCP を把持点に移動させ、2つの点と X 軸を重なり合わせて Y・Z 軸の方向を逆にします。
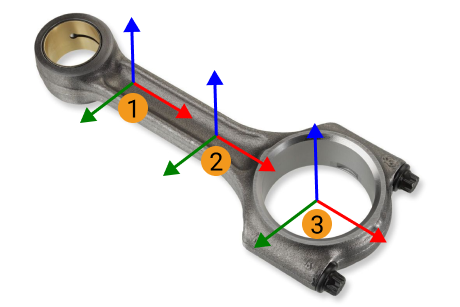
① と ② はリンクの把持点で ③ はリングの把持点です。
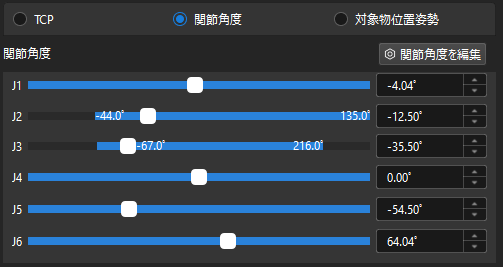
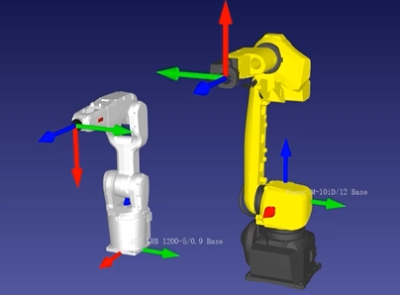
ロボット位置姿勢
ロボットが 3D 空間における位置と方向です。ツール位置姿勢または関節角度で表示します。
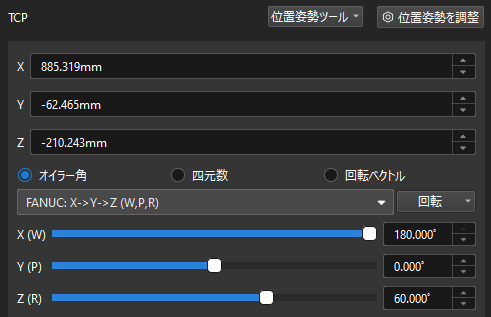
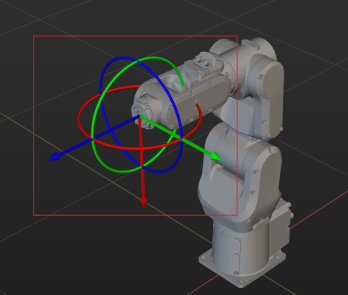
ツール位置姿勢
ロボット座標系におけるツール座標系の位置姿勢です。
末端ツールの位置(x、y、z)と姿勢(オイラー角や四元数などで表示する)です。ロボットがタスクを実行する際のツール(ロボットハンド、溶接トーチなど)の位置と向きを示します。
-
オイラー角
オイラー角(Euler Angles)は、物体が 3D空間における回転を表示します。
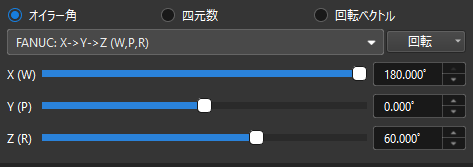
3つの角度で構成されており、それぞれ 3つの軸の回転に対応しています。3つの軸の回転は、対象物座標系の X、Y、Z 軸を中心とする回転です。 ロボットメーカーごとにオイラー角の表現方法は異なります。オイラー角とその表現方法については、より詳しい説明はオイラー角をご参照ください。


-
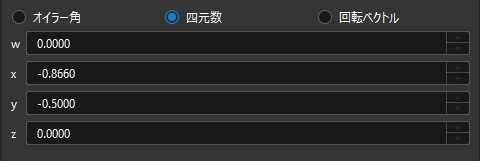
四元数
デッドロックを回避するために、一部のロボットメーカーは四元数を使用します。四元数は、3つの数値で空間の回転軸を定義し、1つの数値で回転角度を定義します。ロボットハンド座標系の初期状態からこの回転軸を中心にこの角度だけ回転させると目標姿勢に到達します。
-
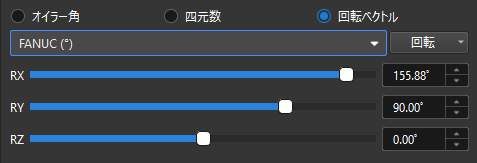
回転ベクトル
軸角度とも呼びます。ロボットハンドの回転を表現します。
UR ロボットが使用しています。
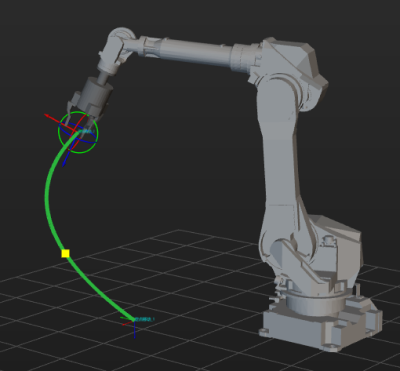
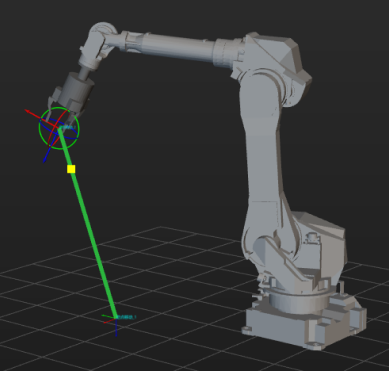
運動タイプ
ロボット運動は、ロボットハンド中心点(TCP)が移動することです。 関節運動と直線運動の 2つのタイプがあります。
並進範囲
対象物を把持できない場合でも、ロボットハンドの把持姿勢を把持位置姿勢の X 軸および(または)Y 軸方向に一定の範囲で並進することで把持できる場合もあります。これを並進範囲といいます。
詳細については、並進範囲をご参照ください。
Vizティーチング通信
ビジョンシステムがロボットと通信する際、ビジョンシステムがロボットを制御してタスクを実行する場合、つまりビジョンシステムが制御側であり、ロボットが被制御側である場合、この通信方式はVizティーチング通信と呼ばれます。この通信方式の具体的な動作は、ビジョンシステムがロボットにコマンドを送信し、ロボットがそのコマンドを受信して実行することです。通信方式の詳細については、通信方式をご参照ください。