ロボットハンド動作を実行
使用シーン
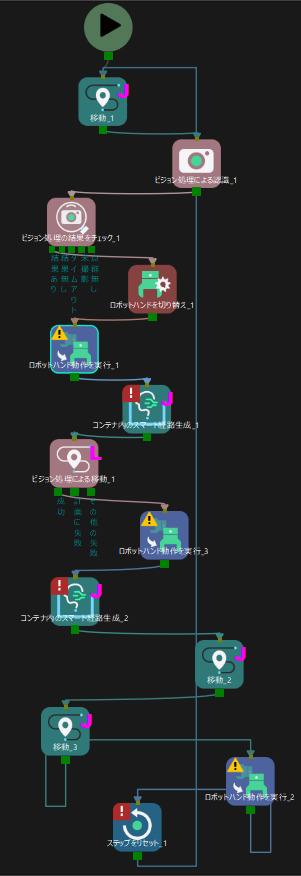
普通、実行モードが適切なロボットハンドに自動的に切り替えるに設定されたロボットハンドを切り替えステップに接続されて使用します。
パラメータ説明
ロボットハンド動作を設定
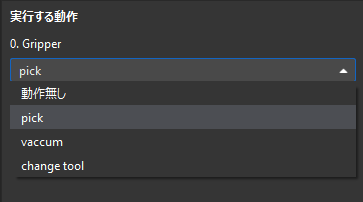
パラメータパネルのロボットハンド動作を設定ボタンをクリックしてロボットハンド動作設定ウィンドウを開きます。
-
一般的なロボットハンドリストから設定するロボットハンドを選択し、右上の追加ボタンをクリックします。
-
表示されたウィンドウに動作名を入力し、確認をクリックすると新しい動作を追加できます。
-
対応するロボットハンド動作タブの+をクリックして動作に DO 信号を設定できます。DO 信号を削除したい場合、行を選択してから-をクリックすればいいです。
-
動作を削除したい場合、ロボットハンド動作タブの
 ボタンをクリックすればいいです。
ボタンをクリックすればいいです。 -
ロボットハンド動作名を変更したい場合、ロボットハンド動作タブの
 ボタンをクリックし、表示されたウィンドウにロボットハンド動作名を入力してください。
ボタンをクリックし、表示されたウィンドウにロボットハンド動作名を入力してください。
|
ロボット動作を実行する時、ポートリストの順序で DO 信号が送信されます。 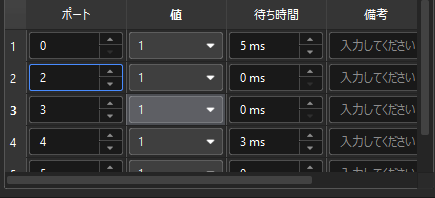
Viz ティーチング通信を使用する時、待ち時間が 0 ではないポートがある場合、使用しているポートの DO 信号送信完了後に指定した時間待ってから次の DO 信号を送信します。例えば上図では、ポート 1 の DO 値を送信した後、5ms 待ってからポート 2 とポート 3 の DO 値を送信します。ポート 4 の DO 値を送信した後、3ms 待ってからポート 5 の DO 値を送信します。 標準インターフェース通信の場合、待ち時間が 0 であれば、このポートの DO 信号はリストに並べられ、リストの後ろにあるポートの待ち時間が 0 以外の値に変わったらそれらと同時に送信されます。例えば上図では、ポート 1 の DO 値を送信した後、5ms 待ちます。それからポート 2、3、4 の DO 値は同時に送信されます。待っていた DO 値が全部送信されたから、ソフトウェアは 3ms 待ちます。 |