位置姿勢を四元数と並進ベクトルに分解
パラメータ説明
| 位置姿勢表示の設定
| パラメータ説明:このパラメータは、位置姿勢の表示形式を設定するために使用されます。
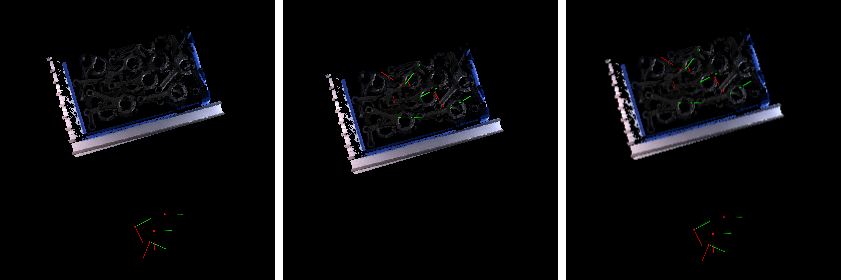
初期値:出力位置姿勢のみを表示
オプション:出力位置姿勢のみを表示、入力位置姿勢のみを表示、入力と出力位置姿勢をすべて表示
調整説明:実際のニーズに応じて選択してください。調整効果を 調整の例 に示します。
| 位置姿勢表示の設定
| パラメータ説明:このパラメータは、位置姿勢の表示形式を設定するために使用されます。
初期値:出力位置姿勢のみを表示
オプション:出力位置姿勢のみを表示、入力位置姿勢のみを表示、入力と出力位置姿勢をすべて表示
調整説明:実際のニーズに応じて選択してください。調整効果を 調整の例 に示します。