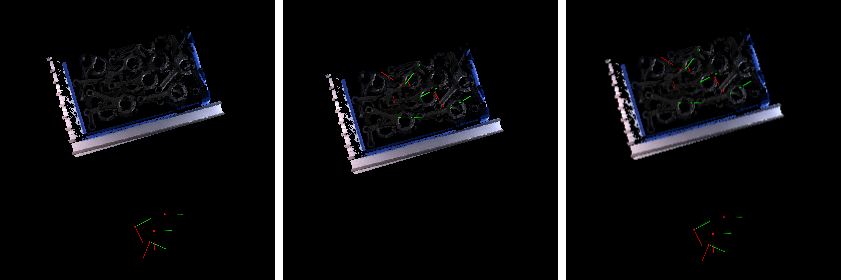
位置姿勢の軸を指定方向に回転
パラメータ説明
可視化設定
| パラメータ | 説明
|
|---|---|
位置姿勢表示の設定 |
パラメータ説明:このパラメータは、位置姿勢の表示形式を設定するために使用されます。
|
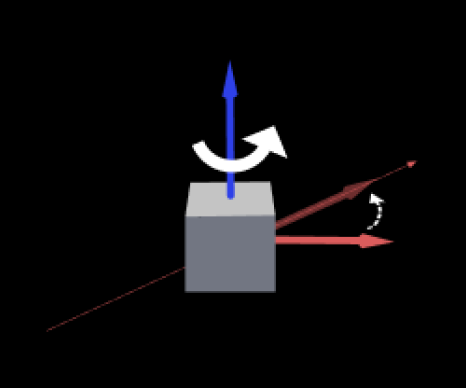
回転設定
| パラメータ | 説明 |
|---|---|
回転させる軸 |
パラメータ説明:目標方向に向ける軸を指定します。
|
固定させる軸 |
パラメータ説明:回転時に固定される軸方向を指定します。位置姿勢はこの軸を中心に回転します。
|
対称性設定
| パラメータ | 説明 |
|---|---|
対象物の対称性を考慮 |
パラメータ説明:回転時に、ワークが回転方向に持つ対称性を考慮するかどうかを指定します。チェックを入れると、目標軸のまわりに「対称角度」の整数倍だけ回転させて得られるすべての方向を同一とみなし、その中から目標方向とのなす角が最小となる位置姿勢を出力します。
|
対称角度(0-360) |
パラメータ説明:ワークが目標軸方向に持つ最小の回転対称角度を設定します。ワークが固定軸のまわりにこの角度だけ回転すると、同一の方向とみなされます。
|
方向が入力からの場合
| パラメータ | 説明 |
|---|---|
入力データのタイプ |
パラメータ説明:入力ポートから取得する目標方向のデータ型を指定します。
|
ゼロノルムの無効な方向を無視 |
パラメータ説明:「カスタム方向」入力ポートが接続されている場合に、ノルムが 0 の無効な方向ベクトルを無視するかどうかを設定します。チェックを入れると、無効なベクトルは自動的に無視されます。
|
目標軸の方向設定
| パラメータ | 説明 |
|---|---|
座標系のタイプ |
パラメータ説明:現在の目標方向が基づく基準座標系を表示します。
|
目標軸の方向 |
パラメータ説明:位置姿勢内の「回転させる軸」を一致させる目標軸方向を指定します。
|
基準方向をカスタマイズ |
パラメータ説明:「目標軸の方向」に「カスタム」を選択した場合の基準方向ベクトルを設定します。
|