位置姿勢補正(組立)
以下では、位置姿勢補正(組立)機能とその使用手順について説明します。
機能
この機能は、ロボットがワークを把持した後、組み立て作業を行う前に、再撮影によるビジョン結果に基づいて、組み立て時のTCP位置姿勢またはフランジ位置姿勢を自動的に補正するために使用します。把持誤差や配置位置のずれを補正し、ロボットによる組み立て精度を向上させることができます。3Dカメラまたは2Dカメラによる再撮影に対応しており、固定配置位置および非固定配置位置の2種類の組み立てシーンに適用できます。
使用前提および制約
位置姿勢補正(組立)機能を使用する前に、以下の前提条件およびプロジェクト上の制約を満たしていることを確認してください。
-
座標系に関する制約
「位置姿勢を変換(拡張)」ステップに入力するすべての位置姿勢データは、ロボット座標系における位置姿勢 である必要があります。 入力位置姿勢がマッチングによって取得されたものである場合は、種類に応じて事前処理を行ってください。
-
3D位置姿勢:「3Dマッチング」などのステップで生成される位置姿勢です。通常はカメラ座標系における3D位置姿勢であるため、位置姿勢を変換 ステップを使用してロボット座標系へ変換する必要があります。
-
2D位置姿勢:「2Dマッチング」などのステップで生成される位置姿勢です。通常はカメラ座標系における2D位置姿勢であるため、「2D点を3D位置姿勢に変換」ステップを使用して、ロボット座標系における3D位置姿勢へ変換する必要があります。
-
-
ロボットハンド(TCP)の設定要件
ティーチング時と実運転時では、同一のロボットハンド設定(TCP)を使用する必要があります。把持治具の交換やTCPの調整を行った場合は、位置姿勢関係の整合性を維持するため、関連するティーチング作業を再度実施してください。
-
再撮影時のビジョン取得に関する要件
位置姿勢補正は、ロボットがワークを把持した後、固定された撮影位置で実施する再度ビジョン取得に基づいて行われます。カメラの種類によって必要な入力位置姿勢は異なります。
-
3Dカメラを使用する場合:ティーチング時に記録した、再度撮影時の TCP位置姿勢 を入力する必要があります。この位置姿勢は「理想的な把持状態」の基準位置姿勢として使用され、運転時に認識されたワークの実際の位置姿勢と組み合わせて把持誤差を算出し、組み立て位置姿勢を補正します。
-
2Dカメラを使用する場合:ティーチング時に記録した、再度撮影時の フランジ位置姿勢 を入力する必要があります。この位置姿勢は「理想的な把持状態」の基準位置姿勢として使用され、運転時に認識されたワークの実際の位置姿勢と組み合わせて把持誤差を算出し、組み立て位置姿勢を補正します。
-
-
配置位置の種類
-
固定配置位置:運転中に配置位置の位置および姿勢が変化しない配置位置です。理想的な組み立て状態はティーチング時にのみ定義され、運転時にリアルタイムで認識する必要はありません。
-
非固定配置位置:運転ごとに配置位置の実際の位置または姿勢が変化する可能性があり、事前に確定できない配置位置です。組み立て前に配置位置認識を実行し、現在の位置姿勢をリアルタイムで取得する必要があります。
-
使用手順
以下では、以下の4種類の組み立てシーンに対応する組み立て位置姿勢補正方法を説明します。用途に応じて適切な手順を選択してください。
3Dカメラによる固定配置位置で組み立て位置姿勢を補正
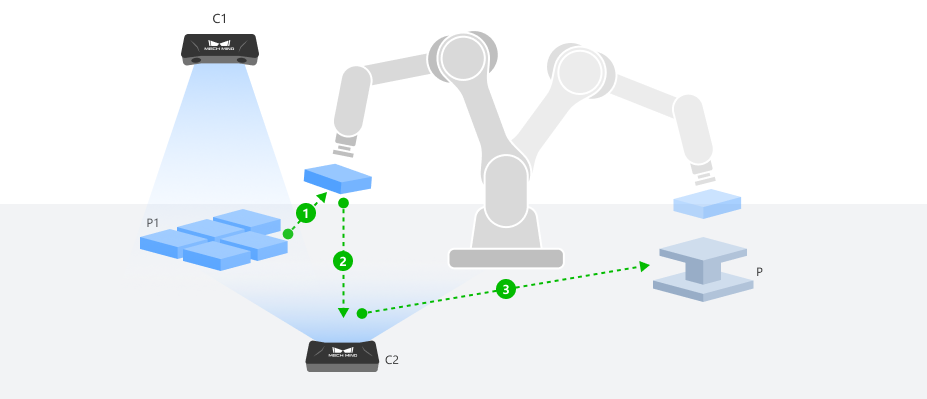
ロボットがワークを把持した後、固定撮影位置へ移動し、3Dカメラでワークの点群を取得して実際の位置姿勢を算出します。その後、ティーチング済みの固定配置位置と組み合わせて、補正後の組み立て用TCP位置姿勢を計算します。
|
以下では、ETH方式で取り付けられた2台の3Dカメラを例に説明します。カメラC1はワークの初期位置決めおよび把持に使用し、カメラC2は固定撮影位置で把持済みワークの再撮影を行います。その他のカメラタイプや取り付け方式を使用する場合も、この手順を参考にしながら実際の構成に合わせて運用してください。 |
ステップポートを設定
-
設定ツール をクリックして位置姿勢変換ツールを開き、位置姿勢補正(組立)を選択します。
-
右側のパラメータエリアで組立シーンを選択し、カメラタイプを 3Dカメラ、配置位置タイプを 固定配置位置 に設定します。
-
OK をクリックして設定を完了します。
設定後の入出力ポートは以下のとおりです。
入力
| 入力ポート | データ型 | 説明 |
|---|---|---|
撮影時のTCP |
Pose [] |
ティーチング時、ロボットがワークを把持した後、再撮影位置へ移動して画像を取得した際に、ティーチペンダントから取得したロボット座標系におけるTCP位置姿勢です。 |
撮影時のワーク位置姿勢 |
Pose [] |
再撮影時における、把持されたワークのロボット座標系での実際の位置姿勢です。 |
固定配置位置姿勢 |
Pose [] |
ロボットがワークを把持した後、配置位置で組み立てのティーチングを行った際に記録したTCP位置姿勢です。 |
出力
| 出力ポート | データ型 | 説明 |
|---|---|---|
組立位置姿勢 |
Pose [] |
補正後の組み立て位置姿勢です。この位置姿勢は、入力されたティーチング時のTCP位置姿勢に回転変換を適用し、他の入力位置姿勢と組み合わせて算出されます。出力された組立位置姿勢は、そのまま「出力」ステップに接続できます。 |
ティーチング位置姿勢を記録(ティーチング段階)
ステップを実行する前に、標準ワークおよび基準配置位置を使用して、一連のティーチング作業を行い、以下のデータを取得します。
-
固定配置位置姿勢を記録します。
ティーチペンダントを使用してロボットに標準ワークを把持させ、理想的な組み立て位置姿勢まで移動します。ワークP1が配置位置Pに完全に一致することを確認してください。作業中はグリッパを閉じた状態に保ち、ワークを常に把持した状態にしてください。ロボットが停止した後、その時点のTCP位置姿勢を記録し、「固定配置位置姿勢」として使用します。
-
撮影時のTCP位置姿勢を記録し、ワーク点群モデルを作成します。
-
ワークを把持した状態を維持したまま、ティーチペンダントを使用してロボットを適切な再撮影位置へ移動します。カメラC2がワークの特徴を完全かつ鮮明に撮影できることを確認してください。この撮影位置を固定撮影位置として設定し、その時点のTCP位置姿勢を「撮影時のTCP位置姿勢」として記録します。この位置姿勢は、後続のワーク点群モデル作成および位置姿勢補正の基準として使用されます。
-
現在の撮影位置でカメラC2をトリガーし、ワークの点群を取得します。その後、ティーチング方式を用いて、この点群からワーク点群モデルを作成し、後続のモデルマッチングに使用します。
ティーチング方式で点群モデルを作成する際は、前の手順で記録した撮影時のTCP位置姿勢をティーチング把持位置姿勢として使用する必要があります。また、その時点のロボットフランジ位置姿勢およびTCP(ロボットフランジに対するロボットハンドの位置姿勢)を、モデル作成フロー内の「ティーチングによる把持位置姿勢設定」手順に入力してください。
-
-
ステップ入力を設定します。
取得した撮影時のTCP位置姿勢と固定配置位置姿勢 を、それぞれ「位置姿勢を変換(拡張)」ステップの対応する入力ポートに接続します。
3Dカメラによる非固定配置位置で組み立て位置姿勢を補正
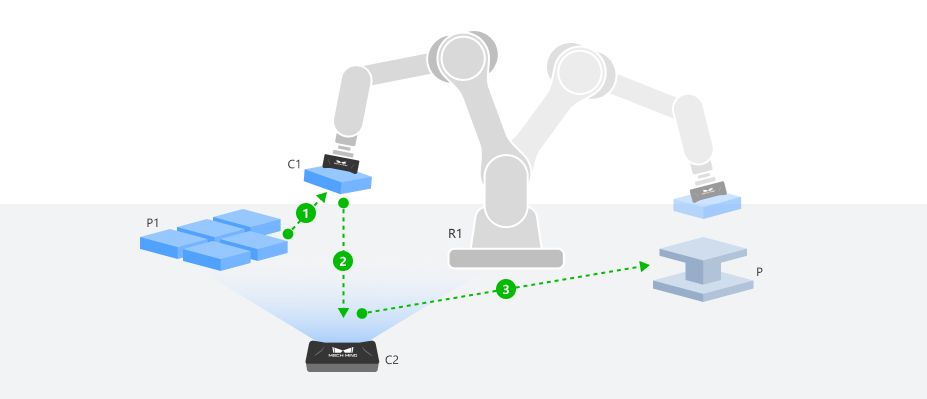
ロボットがワークを把持した後、固定撮影位置へ移動し、3Dカメラでワークの点群を取得して実際の位置姿勢を算出します。同時に、配置位置認識プロジェクトによって配置位置のリアルタイム位置姿勢を取得し、ティーチング段階で作成した理想的な組み立て関係と組み合わせて、補正後の組み立て用TCP位置姿勢を動的に計算して出力します。
|
以下では、EIH方式で取り付けられた3DカメラC1と、ETH方式で取り付けられた3DカメラC2を例に説明します。カメラC1はワークの初期位置決めと把持、および配置位置の位置認識に使用します。カメラC2は固定撮影位置で把持済みワークの再撮影を行います。その他のカメラタイプや取り付け方式を使用する場合も、この手順を参考にしながら実際の構成に合わせて運用してください。 |
ステップポートを設定
-
設定ツール をクリックして位置姿勢変換ツールを開き、位置姿勢補正(組立)を選択します。
-
右側のパラメータエリアで組立シーンを選択し、カメラタイプを 3Dカメラ、配置位置タイプを 非固定配置位置 に設定します。
-
OK をクリックして設定を完了します。
設定後の入出力ポートは以下のとおりです。
入力
| 入力ポート | データ型 | 説明 |
|---|---|---|
撮影時のTCP |
Pose [] |
ティーチング時、ロボットがワークを把持した後、再撮影位置へ移動して画像を取得した際に、ティーチペンダントから取得したロボット座標系におけるTCP位置姿勢です。 |
撮影時のワーク位置姿勢 |
Pose [] |
再撮影時における、把持されたワークのロボット座標系での実際の位置姿勢です。 |
リアルタイム配置位置姿勢 |
Pose [] |
ロボット座標系における配置位置のリアルタイム位置姿勢です。 |
出力
| 出力ポート | データ型 | 説明 |
|---|---|---|
組立位置姿勢 |
Pose [] |
補正後の組み立て位置姿勢です。この位置姿勢は、入力されたティーチング時のTCP位置姿勢に回転変換を適用し、他の入力位置姿勢と組み合わせて算出されます。出力された組立位置姿勢は、そのまま「出力」ステップに接続できます。 |
ティーチング位置姿勢を記録(ティーチング段階)
ステップを実行する前に、標準ワークおよび基準配置位置を使用して、一連のティーチング作業を行い、以下のデータを取得します。
-
配置位置の点群モデルを作成します。
-
ティーチペンダントを使用してロボットに標準ワークを把持させ、理想的な組み立て位置姿勢まで移動します。ワークP1が配置位置Pに完全に一致することを確認してください。作業中はグリッパを閉じた状態に保ち、ワークを常に把持した状態にしてください。ロボットが停止した後、その時点のTCP位置姿勢を記録しします。この位置姿勢は、後続の配置位置の点群モデルを作成するために使用されます。
-
ワークを把持した状態を維持したまま、ロボットを操作してワークを配置エリアから安定して移動させ、配置位置が空の状態に戻り、かつ位置や姿勢が変化していないことを確認してください。
-
ロボットを適切な撮影位置まで移動し、その位置を配置位置用の固定撮影位置として記録します。
-
この撮影位置でカメラC1をトリガーし、配置位置の点群を取得します。その後、ティーチング方式を用いて、この点群から配置位置の点群モデルを作成し、後続のモデルマッチングに使用します。
ティーチング方式で点群モデルを作成する際は、前の手順で記録した理想的な組み立て状態におけるTCP位置姿勢を、ティーチング配置位置姿勢として使用する必要があります。また、その時点のロボットフランジ位置姿勢およびTCP(ロボットフランジに対するロボットハンドの位置姿勢)を、モデル作成フロー内の「ティーチングによる把持位置姿勢設定」手順に入力してください。
-
-
撮影時のTCP位置姿勢を記録し、ワーク点群モデルを作成します。
-
ワークを把持した状態を維持したまま、ティーチペンダントを使用してロボットを適切な再撮影位置へ移動します。カメラC2がワークの特徴を完全かつ鮮明に撮影できることを確認してください。この撮影位置を固定撮影位置として設定し、その時点のTCP位置姿勢を「撮影時のTCP位置姿勢」として記録します。この位置姿勢は、後続のワーク点群モデル作成および位置姿勢補正の基準として使用されます。
-
現在の撮影位置でカメラC2をトリガーし、ワークの点群を取得します。その後、ティーチング方式を用いて、この点群からワーク点群モデルを作成し、後続のモデルマッチングに使用します。
ティーチング方式で点群モデルを作成する際は、前の手順で記録した撮影時のTCP位置姿勢をティーチング把持位置姿勢として使用する必要があります。また、その時点のロボットフランジ位置姿勢およびTCP(ロボットフランジに対するロボットハンドの位置姿勢)を、モデル作成フロー内の「ティーチングによる把持位置姿勢設定」手順に入力してください。
-
-
ステップ入力を設定します。
取得した撮影時のTCP位置姿勢を「位置姿勢を変換(拡張)」ステップの対応する入力ポートに接続します。
リアルタイム位置姿勢を取得(実行段階)
実行段階では、ワークおよび配置位置のリアルタイム位置姿勢をそれぞれ取得し、組み立て用TCP位置姿勢の補正に使用します。
-
撮影時のワーク位置姿勢を取得します。
-
ロボットで実際のワークを把持した後、ティーチングで設定した再撮影位置へ移動し、カメラC2をトリガーしてワークの点群を取得します。
-
取得した点群を前処理した後、「3Dマッチング」ステップでティーチング段階で作成したワーク点群モデルを使用してマッチングを行い、カメラ座標系におけるワーク位置姿勢を出力します。
-
この位置姿勢をロボット座標系へ変換し、「グローバル変数」または「結果をファイルに保存」などのステップを使用して、「位置姿勢を変換(拡張)」ステップの対応する入力ポートへ送信します。
-
-
リアルタイム配置位置姿勢を取得します。
-
ロボットがティーチングで設定した配置位置撮影位置へ移動した際に、カメラC1をトリガーして配置位置の点群を取得します。その後、「3Dマッチング」ステップでティーチング段階で作成した配置位置の点群モデルを使用してマッチングを行い、カメラ座標系における配置位置のリアルタイム位置姿勢を取得します。
-
この位置姿勢をロボット座標系へ変換し、「位置姿勢を変換(拡張)」ステップの「リアルタイム配置位置姿勢」入力ポートに接続します。
-
|
ワークと配置位置がビジョン認識時に相互干渉することを避けるため、撮影時のワーク位置姿勢と配置位置のリアルタイム位置姿勢は、それぞれ独立した Mech-Vision プロジェクトで取得することを推奨します。取得した結果は、「グローバル変数」または「結果をファイルに保存」などのステップを使用して受け渡してください。 |
2Dカメラによる固定配置位置で組み立て位置姿勢を補正
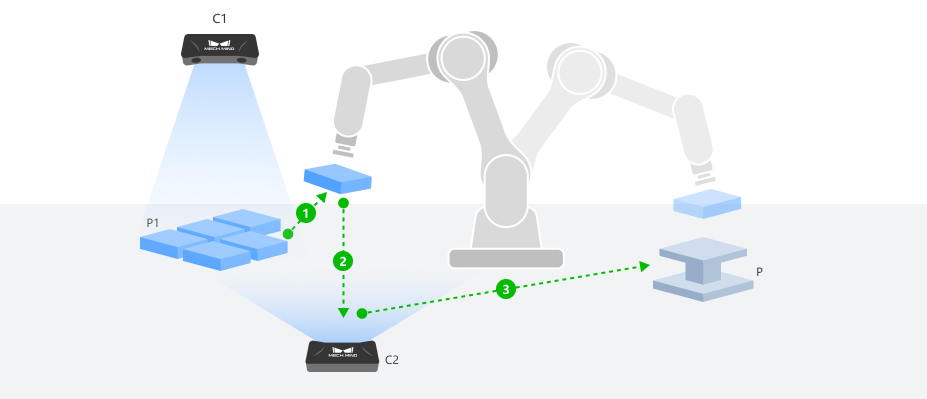
ロボットがワークを把持した後、固定撮影位置へ移動し、2Dカメラでワーク画像を取得します。その後、2D認識結果を3D位置姿勢に変換し、ティーチング済みの固定配置位置と組み合わせて、補正後の組み立て用フランジ位置姿勢を計算します。
|
以下では、ETH方式で取り付けられた3DカメラC1とETH方式で取り付けられた2DカメラC2を例に説明します。カメラC1はワークの初期位置決めおよび把持に使用し、カメラC2は固定撮影位置で把持済みワークの再撮影を行います。その他のカメラタイプや取り付け方式を使用する場合も、この手順を参考にしながら実際の構成に合わせて運用してください。 |
ステップポートを設定
-
設定ツール をクリックして位置姿勢変換ツールを開き、位置姿勢補正(組立)を選択します。
-
右側のパラメータエリアで組立シーンを選択し、カメラタイプを 2Dカメラ、配置位置タイプを 固定配置位置 に設定します。
-
OK をクリックして設定を完了します。
設定後の入出力ポートは以下のとおりです。
入力
| 入力ポート | データ型 | 説明 |
|---|---|---|
撮影時のフランジ位置姿勢 |
Pose [] |
ティーチング時、ロボットがワークを把持した後、再撮影位置へ移動して画像を取得した際に、ティーチペンダントから取得したロボット座標系におけるフランジ位置姿勢です。 |
撮影時のワーク位置姿勢 |
Pose [] |
再撮影時における、把持されたワークのロボット座標系での実際の位置姿勢です。 |
固定配置位置姿勢 |
Pose [] |
ロボットがワークを把持した後、配置位置で組み立てのティーチングを行った際に記録したフランジ位置姿勢です。 |
出力
| 出力ポート | データ型 | 説明 |
|---|---|---|
組立位置姿勢 |
Pose [] |
補正後の組み立て位置姿勢です。この位置姿勢は、入力されたティーチング時のフランジ位置姿勢に回転変換を適用し、他の入力位置姿勢と組み合わせて算出されます。出力された組立位置姿勢は、そのまま「出力」ステップに接続できます。 |
ティーチング位置姿勢を記録(ティーチング段階)
ステップを実行する前に、標準ワークおよび基準配置位置を使用して、一連のティーチング作業を行い、以下のデータを取得します。
-
固定配置位置姿勢を記録します。
-
標準ワークを目標の組み立て位置に手動で配置し、ワークP1が配置位置Pに完全に一致した理想的な組み立て状態であることを確認してください。
-
ティーチペンダントを使用してロボットハンドでワークを把持し、理想的な組み立て位置姿勢まで調整します。ロボットが停止した後、その時点のロボットフランジ位置姿勢を記録し、「固定配置位置姿勢」として使用します。
-
-
ワークの2Dテンプレートを作成します。
-
ワークを把持した状態を維持したまま、ティーチペンダントを使用してロボットを適切な再撮影位置へ移動します。カメラC2がワークの特徴を完全かつ鮮明に撮影できることを確認してください。この撮影位置を固定撮影位置として設定し、その時点のフランジ位置姿勢を「撮影時のフランジ位置姿勢」として記録します。
-
現在の撮影位置でカメラC2をトリガーしてワーク画像を取得し、その画像を用いてワークの2Dテンプレートを作成します。これは後続のテンプレートマッチングに使用されます。
-
-
ステップ入力を設定します。
取得した固定配置位置姿勢と撮影時のフランジ位置姿勢を、それぞれ「位置姿勢を変換(拡張)」ステップの対応する入力ポートに接続します。
リアルタイム位置姿勢を取得(実行段階)
実行段階では、再撮影時におけるワークのリアルタイム位置姿勢を取得し、組み立て用フランジ位置姿勢の補正に使用します。
-
ロボットで実際のワークを把持した後、ティーチングで設定した再撮影位置へ移動し、カメラC2をトリガーしてワーク画像を取得します。
-
取得した画像を前処理した後、「2Dマッチング」ステップでティーチング段階で作成したワークの2Dテンプレートを使用してマッチングを行い、カメラ座標系におけるワークの2D位置姿勢を出力します。
-
その後、「2D点を3D位置姿勢に変換」ステップを使用して、この2D位置姿勢をロボット座標系における3D位置姿勢へ変換し、「位置姿勢を変換(拡張)」ステップの「撮影時のワーク位置姿勢」入力ポートに接続します。
2Dカメラによる非固定配置位置で組み立て位置姿勢を補正
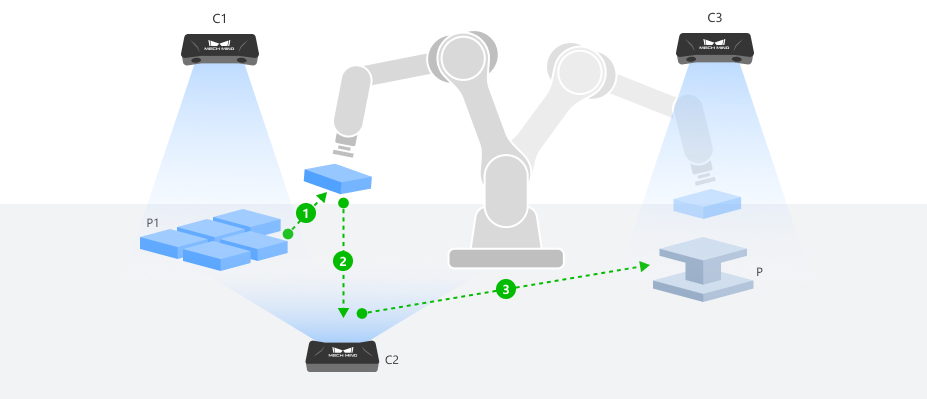
ロボットがワークを把持した後、固定撮影位置へ移動し、2Dカメラでワーク画像を取得します。その後、2D認識結果を3D位置姿勢に変換します。同時に、配置位置認識プロジェクトによって配置位置のリアルタイム位置姿勢を取得し、ティーチング段階で作成した理想的な組み立て関係と組み合わせて、補正後の組み立て用フランジ位置姿勢を動的に計算して出力します。
|
以下では、ETH方式で取り付けられた3台の2Dカメラを例に説明します。カメラC1はワークの初期位置決めおよび把持に使用し、カメラC3は配置位置の位置認識に使用します。カメラC2は固定撮影位置で把持済みワークの再撮影を行います。その他のカメラタイプや取り付け方式を使用する場合も、この手順を参考にしながら実際の構成に合わせて運用してください。 |
ステップポートを設定
-
設定ツール をクリックして位置姿勢変換ツールを開き、位置姿勢補正(組立)を選択します。
-
右側のパラメータエリアで組立シーンを選択し、カメラタイプを 2Dカメラ、配置位置タイプを 非固定配置位置 に設定します。
-
OK をクリックして設定を完了します。
設定後の入出力ポートは以下のとおりです。
入力
| 入力ポート | データ型 | 説明 |
|---|---|---|
撮影時のフランジ位置姿勢 |
Pose [] |
ティーチング時、ロボットがワークを把持した後、再撮影位置へ移動して画像を取得した際に、ティーチペンダントから取得したロボット座標系におけるフランジ位置姿勢です。 |
撮影時のワーク位置姿勢 |
Pose [] |
再撮影時における、把持されたワークのロボット座標系での実際の位置姿勢です。 |
ティーチング時の配置位置姿勢 |
Pose [] |
ロボットがワークを把持して配置位置へ移動し、組み立てのティーチングを行った際に記録したフランジ位置姿勢です。 |
ティーチング配置位置姿勢 |
Pose [] |
配置位置のティーチング時に取得した、ロボット座標系における配置位置の位置姿勢です。 |
リアルタイム配置位置姿勢 |
Pose [] |
ロボット座標系における配置位置のリアルタイム位置姿勢です。 |
出力
| 出力ポート | データ型 | 説明 |
|---|---|---|
組立位置姿勢 |
Pose [] |
補正後の組み立て位置姿勢です。この位置姿勢は、入力されたティーチング時のフランジ位置姿勢に回転変換を適用し、他の入力位置姿勢と組み合わせて算出されます。出力された組立位置姿勢は、そのまま「出力」ステップに接続できます。 |
ティーチング位置姿勢を記録(ティーチング段階)
ステップを実行する前に、標準ワークおよび基準配置位置を使用して、一連のティーチング作業を行い、以下のデータを取得します。
-
ティーチング時の配置位置姿勢を記録します。
-
標準ワークを目標の組み立て位置に手動で配置し、ワークP1が配置位置Pに完全に一致した理想的な組み立て状態であることを確認してください。
-
ティーチペンダントを使用してロボットハンドでワークを把持し、理想的な組み立て位置姿勢まで調整します。ロボットが停止した後、その時点のロボットフランジ位置姿勢を記録し、「ティーチング時の配置位置姿勢」として使用します。
-
-
配置位置のテンプレートを作成し、ティーチング配置位置姿勢を記録します。
-
ワークを把持した状態を維持したまま、ロボットを操作してワークを配置エリアから安定して移動させ、配置位置が空の状態に戻り、かつ位置や姿勢が変化していないことを確認してください。
-
ロボットを配置位置の視野に影響しない位置まで移動し、カメラC3が空の配置位置を完全に撮影できることを確認します。この撮影位置を、配置位置用の固定撮影位置として記録します。
-
この撮影位置でカメラC3をトリガーして配置位置の画像を取得し、その画像を基に配置位置の2Dテンプレートを作成します。これは後続のテンプレートマッチングに使用されます。
-
「2Dマッチング」ステップでこのテンプレートを使用して配置位置の画像をマッチングし、「2D点を3D位置姿勢に変換」ステップを使用して、この時点のロボット座標系における配置位置の3D位置姿勢を出力します。この位置姿勢を「ティーチング配置位置姿勢」として使用します。
-
-
ワークの2Dテンプレートを作成します。
-
ワークを把持した状態を維持したまま、ティーチペンダントを使用してロボットを適切な再撮影位置へ移動します。カメラC2がワークの特徴を完全かつ鮮明に撮影できることを確認してください。この撮影位置を固定撮影位置として設定し、その時点のフランジ位置姿勢を「撮影時のフランジ位置姿勢」として記録します。
-
現在の撮影位置でカメラC2をトリガーしてワーク画像を取得し、その画像を用いてワークの2Dテンプレートを作成します。これは後続のテンプレートマッチングに使用されます。
-
-
ステップ入力を設定します。
取得したティーチング時の配置位置姿勢、ティーチング配置位置姿勢、および撮影時のフランジ位置姿勢を、それぞれ「位置姿勢を変換(拡張)」ステップの対応する入力ポートに接続します。
リアルタイム位置姿勢を取得(実行段階)
実行段階では、ワークおよび配置位置のリアルタイム位置姿勢をそれぞれ取得し、組み立て用フランジ位置姿勢の補正に使用します。
-
撮影時のワーク位置姿勢を取得します。
-
ロボットで実際のワークを把持した後、ティーチングで設定した再撮影位置へ移動し、カメラC2をトリガーしてワーク画像を取得します。
-
取得した画像を前処理した後、「2Dマッチング」ステップでティーチング段階で作成したワークの2Dテンプレートを使用してマッチングを行い、カメラ座標系におけるワークの2D位置姿勢を出力します。
-
その後、「2D点を3D位置姿勢に変換」ステップを使用して、この2D位置姿勢をロボット座標系における3D位置姿勢へ変換し、「位置姿勢を変換(拡張)」ステップの「撮影時のワーク位置姿勢」入力ポートに接続します。
-
-
リアルタイム配置位置姿勢を取得します。
-
ロボットがティーチングで設定した配置位置撮影位置へ移動した際に、カメラC3をトリガーして配置位置の画像を取得します。その後、「2Dマッチング」ステップでティーチング段階で作成した配置位置の2Dテンプレートを使用してマッチングを行い、カメラ座標系における配置位置の2D位置姿勢を出力します。
-
「2D点を3D位置姿勢に変換」ステップを使用して、この2D位置姿勢をロボット座標系における3D位置姿勢へ変換し、「グローバル変数」または「結果をファイルに保存」ステップを使用して、「位置姿勢を変換(拡張)」ステップへ送信します。
-
|
ワークと配置位置がビジョン認識時に相互干渉することを避けるため、撮影時のワーク位置姿勢と配置位置のリアルタイム位置姿勢は、それぞれ独立した Mech-Vision プロジェクトで取得することを推奨します。取得した結果は、「グローバル変数」または「結果をファイルに保存」などのステップを使用して受け渡してください。 |