座標系変換
以下では、座標系変換機能とその使用手順について説明します。
機能
この機能は、入力された位置姿勢または点群を、現在の座標系からカスタム基準座標系へ変換するために使用します。カスタム座標系の基準姿勢を入力することで、異なる基準座標系間でデータの位置合わせや切り替えを行うことができます。
使用手順
以下では、この機能を使用して位置姿勢および点群の座標系を変換する方法についてそれぞれ説明します。
位置姿勢の座標系を変換
位置姿勢の座標系変換を行う前に、ステップポートの設定を完了する必要があります。
ステップポートを設定
-
設定ツール をクリックして位置姿勢変換ツールを開き、座標系変換 を選択します。
-
右側のパラメータエリアで、変換タイプに 位置姿勢 を選択します。
-
OK をクリックして設定を完了します。
設定後の入出力ポートは以下のとおりです。
入力
| 入力ポート | データ型 | 説明 |
|---|---|---|
元の位置姿勢 |
Pose [] |
このポートに入力された位置姿勢の座標系が変換されます。 |
カスタム座標系 |
Pose [] |
入力された位置姿勢は、このポートに入力されたカスタム座標系へ変換されます。 |
出力
| 出力ポート | データ型 | 説明 |
|---|---|---|
変換後の位置姿勢 |
Pose [] |
座標系変換後の位置姿勢。 |
|
変換対象となる位置姿勢と、カスタム基準位置姿勢は、同一座標系内に存在している必要があります。 |
位置姿勢の座標系を変換
元の位置姿勢 と カスタム座標系 を入力することで、元の位置姿勢をカスタム座標系へ変換できます。以下では、「位置姿勢を変換(拡張)」ステップを使用して位置姿勢の座標系を変換する方法を、実際のプロジェクトでよく使われるシーンとあわせて説明します。
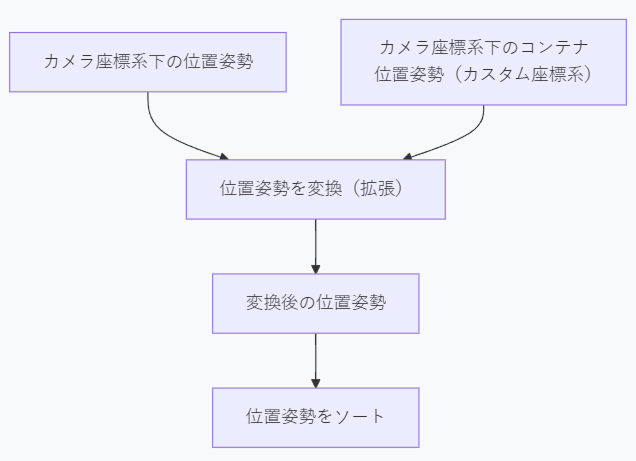
シーン1:コンテナが傾いている場合に、コンテナのZ方向に沿ってワークをソートする
実際の生産現場では、コンテナ全体が傾いている場合があります。この場合、カメラ座標系におけるワークの Z 値は、コンテナ内での実際の高さ順を正しく反映できません。このような場合は、ワークの位置姿勢をコンテナ自身の座標系へ変換し、コンテナの Z 軸に沿ってソートすることで、コンテナ内でのソートや層別ピッキングなどを実現できます。詳細な手順は以下の通りです。
-
カメラ座標系下のワーク位置姿勢を「元の位置姿勢」とし、取得したコンテナ位置姿勢を「カスタム座標系」として入力します。「位置姿勢を変換(拡張)」ステップを使用して、ワーク位置姿勢をコンテナ座標系へ変換します。
-
コンテナ座標系下で、位置姿勢ソートなどのステップを使用し、Z 軸に沿ってワークをソートします。
|
ワーク位置姿勢のソートが完了した後は、通常、ソート後の位置姿勢を元の座標系へ戻す必要があります。これは 位置姿勢を変換 ステップで実現できます。ソート後の位置姿勢 を「元の位置姿勢」とし、「位置姿勢を変換(拡張)」ステップで使用した カスタム座標系 を「基準位置姿勢」として入力すると、カスタム座標系から元の座標系への逆変換を実行できます。 |
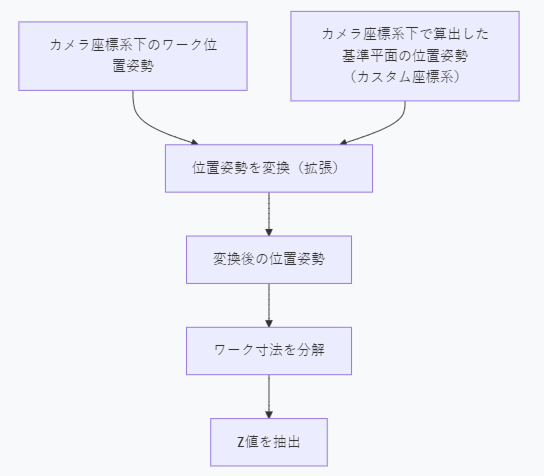
シーン2:基準平面が傾いている場合に、ワークの相対高さを計算する
一部のシーンでは、ワークが水平ではない基準平面上に配置されることがあります。例えば、傾いたコンベアや治具などが該当します。この場合、カメラ座標系におけるワークの Z 値をそのまま読み取っても、ワークの基準平面に対する実際の高さを正確に反映できません。
ワークの相対高さを取得するには、基準平面を XY 平面とするカスタム座標系へワーク位置姿勢を変換します。これにより、Z 軸が基準平面に垂直となり、ワークの相対高さを正確に計算できます。詳細な手順は以下の通りです。
-
平面点群の位置姿勢とサイズを計算 などのステップを使用し、カメラ座標系下の基準平面点群に基づいて基準位置姿勢、つまりカスタム座標系を算出します。
-
「位置姿勢を変換(拡張)」ステップを使用して、元のワーク位置姿勢をこのカスタム座標系へ変換します。
-
変換後の位置姿勢を分解し、並進ベクトルの Z 成分を抽出します。この値を、ワークの基準平面に対する相対高さとして使用します。
変換後の Z 値が、ワークの基準平面に対する実際の高さになります。後続処理で元の座標系下の位置姿勢を引き続き使用する必要がある場合は、「位置姿勢を変換」ステップを使用して元の座標系へ戻すことができます。 |
点群の座標系を変換
点群の座標系変換を行う前に、ステップポートの設定を完了する必要があります。
ステップポートを設定
-
設定ツール をクリックして位置姿勢変換ツールを開き、座標系変換 を選択します。
-
右側のパラメータエリアで、変換タイプに 点群 を選択します。
-
OK をクリックして設定を完了します。
設定後の入出力ポートは以下のとおりです。
入力
| 入力ポート | データ型 | 説明 |
|---|---|---|
元の点群 |
PointCloud [] |
このポートに入力された点群の座標系が変換されます。 |
カスタム座標系 |
Pose [] |
入力された点群は、このポートに入力されたカスタム座標系へ変換されます。 |
出力
| 出力ポート | データ型 | 説明 |
|---|---|---|
変換後の点群 |
PointCloud [] |
座標系変換後の点群。 |
|
変換対象となる点群と、カスタム基準位置姿勢は、同一座標系内に存在している必要があります。 |
点群の座標系を変換
元の点群 と カスタム座標系 を入力することで、元の点群をカスタム座標系へ変換できます。以下では、「位置姿勢を変換(拡張)」ステップを使用して点群の座標系を変換する方法を、実際のプロジェクトでよく使われるシーンとあわせて説明します。
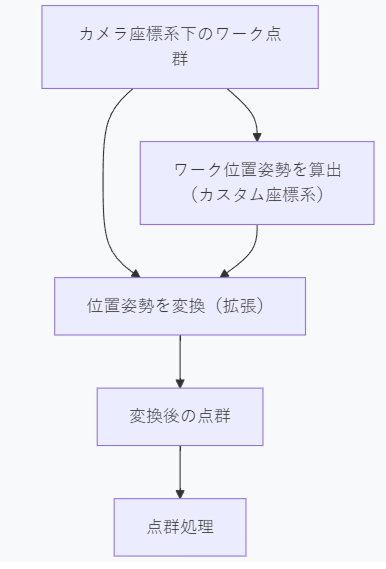
シーン1:カメラの撮影方向とワーク平面が一致していない
実際のアプリケーションでは、ワークの反射などの影響により、3Dカメラをワーク表面に対して垂直に設置できず、一定の傾斜角度で設置しなければならない場合があります。その結果、取得した点群はカメラ座標系において傾いた状態となります。この座標系のまま点群フィルタリングなどの処理を行うと、有効な点を誤って除去したり、ノイズ点を残したりする可能性があり、その後の平面フィッティング、特徴抽出、測定精度に影響を及ぼします。
処理精度を向上させるために、ワークの主平面点群を基にカスタム座標系(Z軸がワーク平面に垂直な座標系)を構築し、「位置姿勢を変換(拡張)」ステップを使用して元の点群をカメラ座標系からワークのローカル座標系へ変換してから点群の前処理を行います。処理完了後は、点群をカメラ座標系へ戻します。詳細な手順は以下の通りです。
-
平面点群の位置姿勢とサイズを計算 などのステップを使用し、カメラ座標系下のワーク平面点群に基づいて基準位置姿勢、つまりカスタム座標系を算出します。
-
「位置姿勢を変換(拡張)」ステップを使用して、元のワーク点群をこのカスタム座標系へ変換し、点群処理を行います。
|
点群の前処理が完了した後は、通常、処理後の点群を元の座標系へ戻す必要があります。点群変換 ステップで変換方法に「UseCorrespondenceInput」を選択し、処理後の点群 を「元の点群」として入力します。また、「位置姿勢を変換(拡張)」ステップで使用した カスタム座標系 を「基準位置姿勢」として入力することで、ワーク座標系からカメラ座標系への逆変換を実現できます。 |
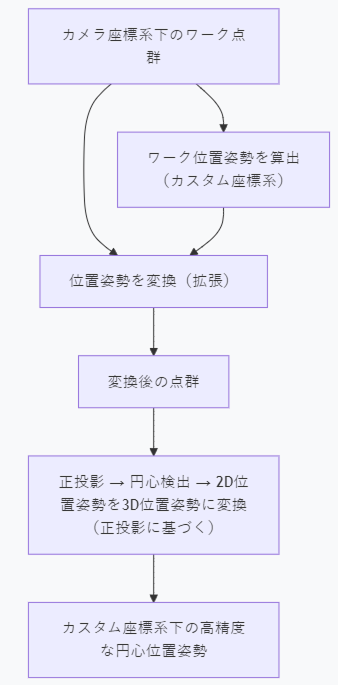
シーン2:正確な円心を取得する(正投影に基づく)
一部の高精度アプリケーションでは、3Dマッチングのみで円心などの幾何学的特徴の位置を正確に取得することが難しい場合があります。検出精度を向上させるために、点群の座標系変換と正投影を組み合わせる方法を使用できます。点群をワーク座標系へ変換した後に2D特徴抽出を行い、その結果をカメラ座標系へ戻すことで、より高精度な円心位置姿勢を取得できます。この方法は、組立穴や円弧エッジの高精度位置決めによく使用されます。詳細な手順は以下の通りです。
-
平面点群の位置姿勢とサイズを計算 などのステップを使用し、カメラ座標系下のワーク平面点群に基づいて基準位置姿勢、つまりカスタム座標系を算出します。
-
「位置姿勢を変換(拡張)」ステップを使用して、元のワーク点群をこのカスタム座標系へ変換します。
-
変換後の点群に対して、正投影 などのステップを使用して2D特徴抽出を行い、円心位置姿勢を計算します。
|
高精度な円心位置姿勢を取得した後は、通常、その位置姿勢をカメラ座標系へ戻す必要があります。これは 位置姿勢を変換 ステップで実現できます。計算した円心位置姿勢 を「元の位置姿勢」とし、「位置姿勢を変換(拡張)」ステップで使用した カスタム座標系 を「基準位置姿勢」として入力することで、ワーク座標系からカメラ座標系への逆変換を実現できます。 |