将2D点转换为3D位姿
功能描述
该步骤可将 2D 相机识别到的工件 2D 位姿或 2D 形状,结合相机外参标定数据和示教位姿,转换为机器人坐标系下的 3D 工件位姿。
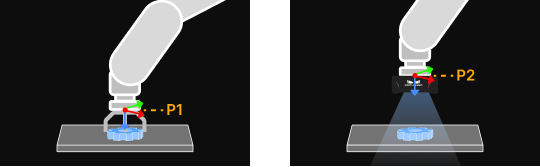
图中左侧为示教的基准抓取位姿(P1),右侧为示教的拍照时法兰位姿(P2)。
参数说明
| 参数 | 解释 |
|---|---|
输入类型 |
参数解释:指定输入的数据类型,包括工件 2D 位姿和工件 2D 形状两种。 |
选择相机步骤 |
参数解释:选择已完成外参标定的 2D 相机步骤,以确保标定数据正确应用于当前步骤。 |
基准工件2D位姿 |
参数解释:基准工件在拍照时识别到的 2D 位姿,通常从上一步骤输出至该输入端口的数据流中获得。 |
基准抓取位姿 |
参数解释:机器人抓取基准工件时的法兰位姿,该位姿为示教器上读取的机器人坐标系下的法兰位姿。 |
拍照时法兰位姿 |
参数解释:Eye in Hand 场景下,机器人在拍照点拍摄基准工件时的法兰位姿,该位姿为示教器上读取的机器人坐标系下的法兰位姿。 |
从参数中获取法兰位姿 |
参数解释:开启通信服务后,该功能会自动关闭,且输入的机器人法兰位姿不会被使用。 调节说明:如需重新输入机器人法兰位姿,请关闭通信服务后重新开启该功能。 |
拍照时法兰位姿 |
参数解释:输入实际拍照时的机器人法兰位姿。 |
通信组件中的机器人服务名 |
参数解释:填写机器人型号,需与通信组件中连接的机器人型号一致。 |