
标定球使用说明(ETH)
本节介绍用于ETH视觉系统漂移自校正的标定球的使用说明。
包装清单
标定球相关包装清单如下表所示。
|
| 序号 | 配件 | 图示 |
|---|---|---|
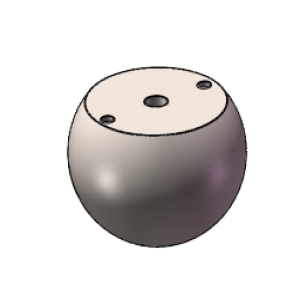
1 |
直径 60 mm 的标定球 × 1 |
|
2 |
软嘴气吹 × 1 |
|
3 |
|
|
标定球的具体规格信息如下表所示。
| 规格 | 图示 |
|---|---|
标定球 × 3
|
|
如果包装箱内的螺栓和销钉长度不合适,需自行准备螺栓和销钉。推荐的螺栓和销钉的规格如下表所示。
| 序号 | 规格 | 图示 | 备注 |
|---|---|---|---|
1 |
12.9 级 M8 螺栓套件 × 1
|
|
与标定球中心的螺纹孔配合使用。 |
2 |
直径 6 mm 的圆柱销钉 × 2
|
|
与标定球两侧的销孔配合使用。 |


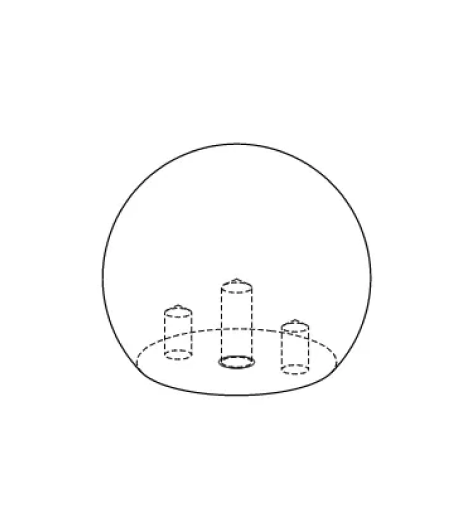
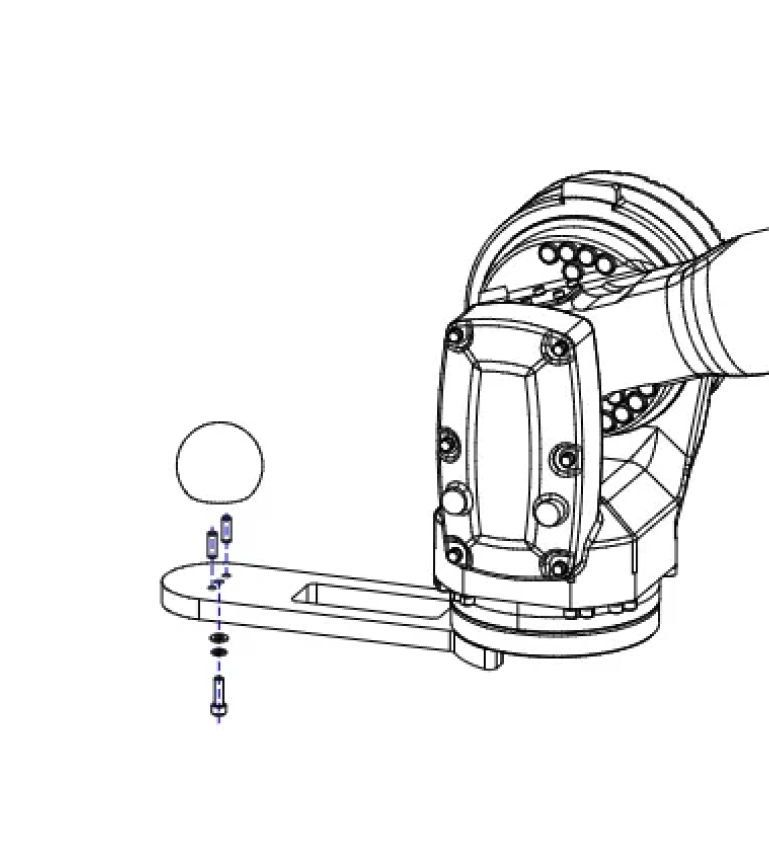
安装示意
如下图所示,使用螺栓和销钉将标定球安装在机器人末端(如牢固的夹具、法兰盘连接件)。
安装注意事项
安装标定球前后,需注意以下问题。
-
安装前
-
检查生产环境中是否有杂物(粉尘、焊渣等)飞落,如有,需为标定球增加保护罩。
-
接触标定球时,请务必佩戴防尘手套。
-
-
安装时
-
建议对螺栓进行点胶。
-
胶水选择:推荐使用螺纹胶。
-
点胶位置:螺牙紧固位置。
-
胶量控制:胶水不可溢出螺纹槽,点胶后拿起螺栓时不可有胶水滴落。
-
-
使用螺栓固定标定球时,建议螺栓露出螺母的长度为螺栓直径的 0.3 倍左右。
-
确保相机拍照时标定球不被遮挡。
-
确保机器人携带标定球尽量能到达尽可能多的工件位置。
-
当机器人携带较大或较长的夹具到达标定球拍照点时,需特别注意避免夹具与标定球周围的物体发生碰撞。
-
-
安装后
-
标定球安装后,需使用记号笔对螺栓与接触面进行标记,以便后续检查标定球是否发生松动。
-
维护保养
为了确保采集的标定球位姿准确可靠,建议每日对标定球进行一次下列检查。
松动检查与处理
检查松动
-
观察标定球表面,检查是否存在可见的划痕、凹坑、污渍或其他物理损伤。
-
观察螺栓与接触面的标记,检查是否存在以下问题:
-
标记是否仍然清晰可见。
-
标记是否发生错位或破损,以判断螺栓是否松动。
-
|
若发现异常,需记录并通知相关人员进行处理。 |
处理松动
如果发现标定球松动或位移,请按以下步骤进行操作:
-
加固标定球,同时排查松动原因并消除松动。
-
运行机器人自校正程序,重新采集标定球位姿,生成漂移校正数据。
-
测试机器人是否能准确抓取所有工件。
-
如果机器人能准确抓取所有工件,则操作结束。
-
如果机器人不能准确抓取所有工件,则需重新部署漂移自校正功能。
但在重新部署前需先判断在没有漂移自校正功能的前提下,机器人能否准确抓取工件。
此时需先暂时禁用漂移自校正功能,即取消勾选视觉工程中“输出”或“路径规划”步骤的“自动校正视觉系统漂移”参数,然后测试机器人能否准确抓取工件。
-
若机器人能准确抓取所有工件,则只需重新部署漂移自校正功能。
-
若机器人不能准确抓取所有工件,则需先确保机器人抓取工件的精度正常(如重新通过示教法添加抓取点),然后再重新部署漂移自校正功能。
-
-