EIH系统漂移自校正
本节将对“EIH系统漂移自校正”的功能、适用场景、部署流程进行说明。
|
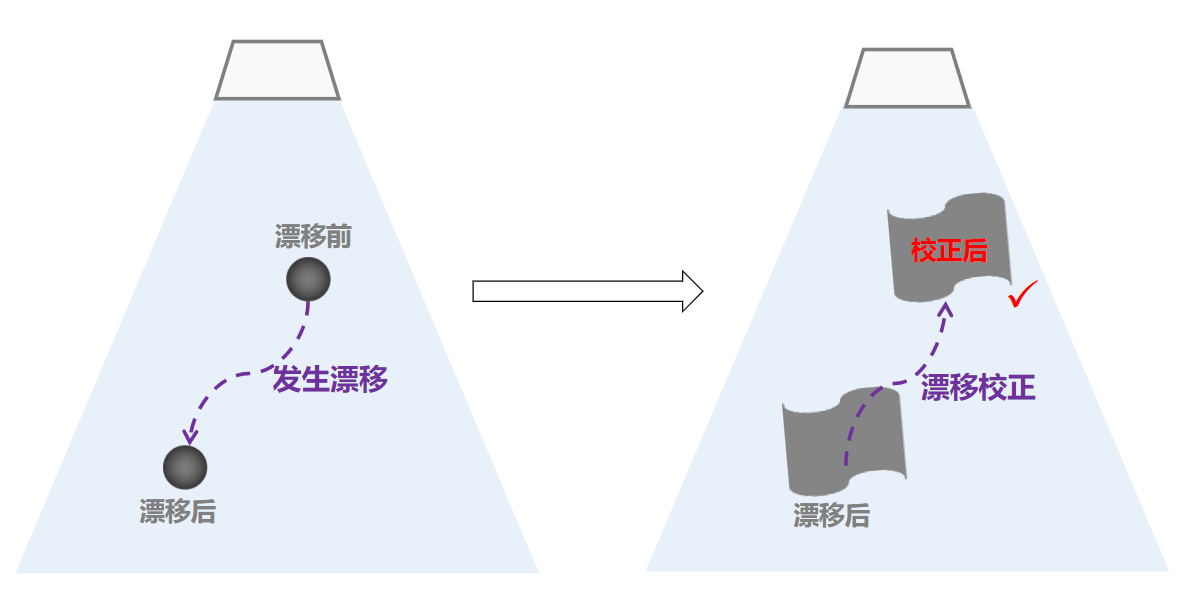
系统漂移指视觉系统精度漂移,即视觉系统的精度随着时间的推移逐渐降低,通常是由外部环境的变化、视觉系统内部的不稳定性等因素引起的。 |
功能简介
在视觉系统运行过程中,下列问题影响着系统稳定性及后期的维护成本。
-
现场昼夜温差大,可能引起抓取精度波动。
-
视觉系统长期运行,可能导致抓取精度变差。
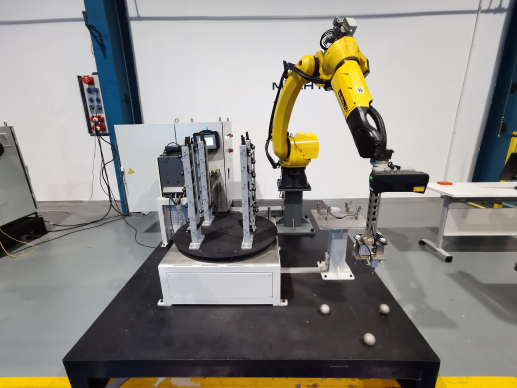
为了解决上述问题,针对 Eye in Hand 相机安装方式的视觉系统,精度误差分析工具中内置了“EIH系统漂移自校正”功能,自动校正系统漂移。

部署流程
|
该功能部署流程仅限中国地区使用,如需在海外地区项目中进行部署,请联系梅卡曼德产品工程师。 |
该功能的部署流程如下图所示。

-
准备工作:部署前,需检查机器人重复精度并确保正常,然后按要求准备标定板和标定球。
-
工位信息采集:采集不同抓取层的标定板位姿,用于后续自动计算所需的标定球拍照点。
-
布置标定球:通过定位标定板获得推荐的标定球拍照点,然后在该拍照点连续采集标定球图像,自动生成标定球固定位置。
-
创建标定球拍照点:根据推荐的标定球位置信息,自动创建出标定球拍照点,然后需框选标定球,对标定球进行定位。
-
采集基准数据:采集标定球位姿数据,统计标定球位姿的重复精度,作为系统漂移校正时的基准数据。
-
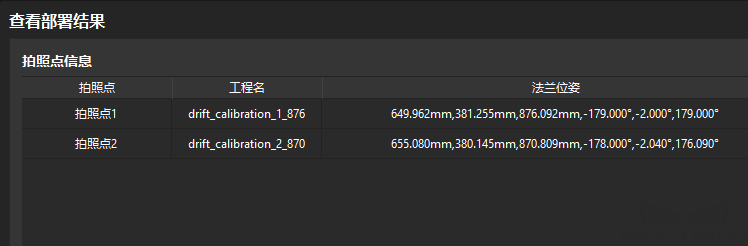
查看部署结果:查看上述部署得到的拍照点相关信息。
-
编写机器人程序:编写机器人程序,在实际生产时控制机器人采集标定球位姿数据,作为系统漂移校正时的现场数据。
-
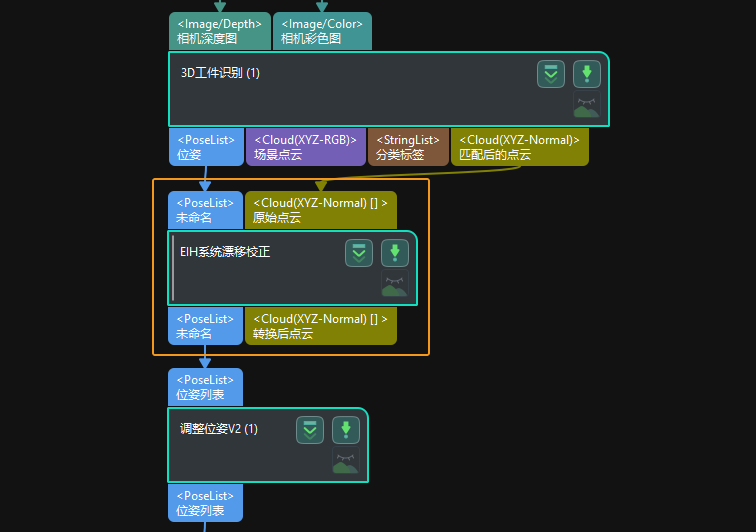
部署视觉工程:添加“EIH系统漂移校正”步骤组合,用于自动校正系统漂移。
-
EIH系统漂移校正:完成上述部署后,实际生产时将自动校正系统漂移。
准备工作
部署前,需完成若干准备工作,具体说明如下。
检查机器人重复精度
为了确保部署过程中机器人重复精度正常,需在部署前检查机器人重复精度。具体操作可参考机器人重复精度检查。
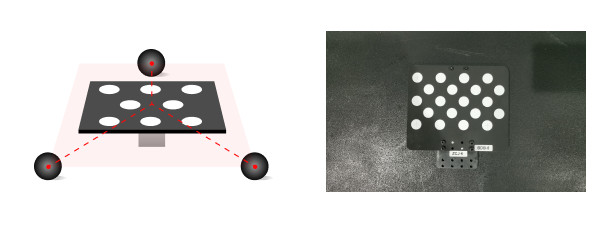
准备标定球
漂移校正过程中需使用到三个标定球,可按如下要求进行准备。
-
使用梅卡曼德提供的标定球
梅卡曼德提供直径 60 mm 的哑光铁球,可联系梅卡曼德工程师获取。
梅卡曼德仅提供标定球,其他配件需自行准备。关于标定球及其他配件的具体介绍可参考标定球。
-
自行准备标定球
如使用其他标定球,可按如下要求自行准备。
材质 直径 球形度 球完整度 点云质量好。如哑光铁球、陶瓷球等。
-
如果标定球到相机的距离为 0.5m~2m,可选择直径约 60 mm 的标定球。
-
(不常见)如果标定球到相机的距离小于 0.5 m,可选择直径约 30 mm 或 40 mm 的标定球。
-
(不常见)如果标定球到相机的距离大于 2 m,可选择直径约 100 mm 的标定球。
球形度需接近 1,不能使用椭球。
可切掉球的一部分,形成切面后便于标定球安装,但至少需确保五分之四的球完整度。
-
完成以上准备工作后,单击该功能首页右下角的开始部署按钮,即可进入部署向导。
|
工位信息采集
定位标定板
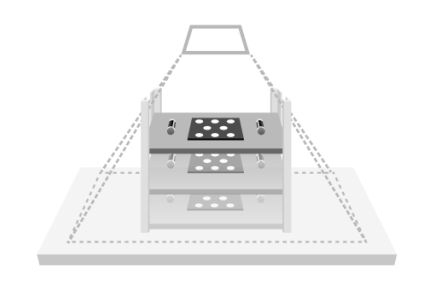
完成上述步骤后,接下来请按如下图示和要求定位标定板,采集工位上各个抓取层的标定板位姿。
|
为使标定板定位准确,需保证相机视野中仅有一个标定板。 |
-
将标定板放置在最高层工件所在高度的视野中心位置。
对于较大尺寸的工件,需将标定板放置于工件的特征部位,即用于点云模板匹配的部位。
-
将机器人移动到抓取层上方的拍照点,该拍照点必须和实际生产时的拍照点保持一致。
-
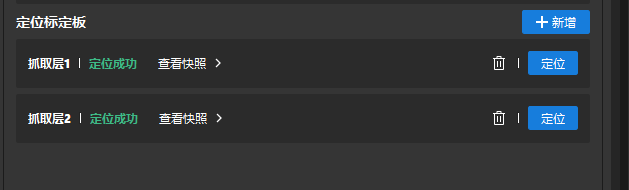
单击+新增,新增抓取层。
-
单击定位,对当前抓取层的标定板进行拍照。
-
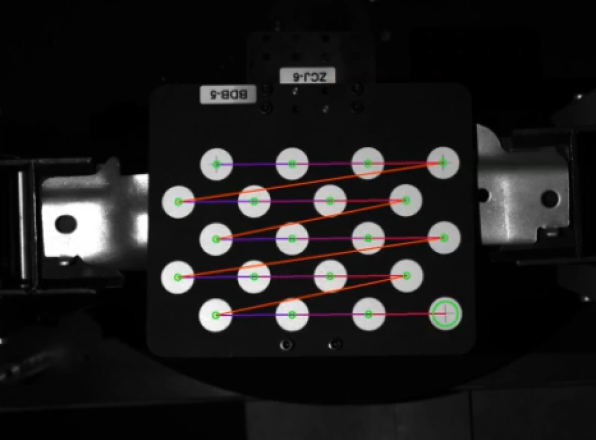
定位成功后,将提示定位成功,可单击查看快照,查看定位成功的标定板,如下图所示。
-
如定位失败,将提示定位失败,可单击框选标定板,在弹出的窗口中对标定板进行框选,或调整相机参数组后重试。
-
-
重复以上步骤,直至所有抓取层信息采集完毕。
工位信息采集完成后,单击下一步,布置标定球。
布置标定球
通过定位标定板,以及机器人法兰位姿,获得拍摄标定球的机器人位姿,在该位姿下开启相机,可获取标定球的推荐位置,然后即可固定标定球。
布置标定板
-
布置标定板。
标定板正面朝上,在地面上水平放置,且标定板四周应为放置标定球留出余地。标定板下方一般需要类似木板的物体支撑,保证标定板高度与标定球球心高度一致。
-
定位标定板。
移动机器人,将相机调整至合适高度,确保在相机视野内可拍到清晰的标定板,并且标定板位于相机视野正中心,然后单击定位。
-
定位成功后,定位按钮左侧将提示定位成功,并显示标定板快照。此时需将当前机器人法兰位姿输入到界面上。

需注意检查机器人欧拉角类型,确保欧拉角类型选择正确。
-
如定位失败,定位按钮左侧将提示定位失败,可单击框选标定板,在弹出的窗口中对标定板进行框选。
-
-
计算拍照点。
标定板定位成功后,单击下方计算拍照点,自动计算标定球拍照点,即拍照时的机器人法兰位姿。
布置标定球
|
若在“工位信息采集”步骤中确认现场已固定了标定球,则在此步骤中只需设置标定球直径。 |
-
了解标定球布置规则。
将机器人移动至推荐拍照点后,标定球所在平面尽量垂直于相机光轴。
-
查看推荐的法兰位姿。
“布置标定板”步骤获取到若干机器人法兰位姿后,当前页面将显示离标定球最近的一个机器人法兰位姿,作为推荐值。此时需将机器人移动至该推荐位姿。
移动机器人时,需确保机器人不会发生碰撞。推荐先手动将机器人低速移至目标位姿,时刻观察机器人是否会发生碰撞。
如果机器人在路径中有可能发生碰撞,可适当抬升标定球拍照点,但需保证拍照点抬升范围在 100 mm 以内。如果超过 100 mm,则需为标定球增加底座。

-
选择标定球直径。
根据实际准备的标定球,选择标定球直径。

-
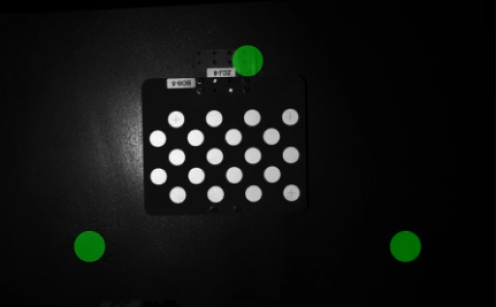
放置并固定标定球。
单击连续采集,按显示的推荐位置(绿色圆点处)布置并固定标定球。
-
将标定球牢固安装在地面上。需注意实际生产时,应避免误碰标定球。
-
使用记号笔在标定球和球座之间划线作为记号,以检查标定球与球座的相对位置是否发生改变。
-
固定完成后,单击确认固定。
关于更多标定球安装与维护相关的要求可参考标定球安装与维护。
-
标定球固定后,单击下一步,创建标定球拍照点。
创建标定球拍照点
拍照点管理
当前默认显示推荐的拍照点。如需增加拍照点,可单击+新增;如需删除拍照点,可单击 ![]() 。
。
-
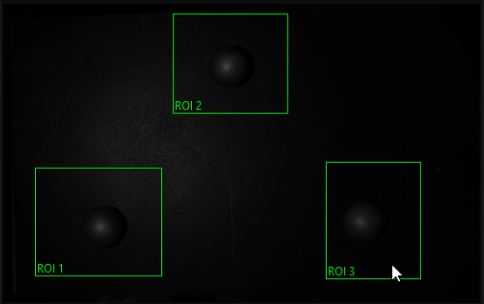
对于默认的拍照点,需先移动机器人到拍照点,然后单击框选,为每个拍照点框选标定球。
移动机器人时,需确保机器人不会发生碰撞。推荐先手动将机器人低速移至目标位姿,时刻观察机器人是否会发生碰撞。
如果机器人在路径中有可能发生碰撞,可适当抬升标定球拍照点,但需保证拍照点抬升范围在 100 mm 以内。如果超过 100 mm,则需为标定球增加底座。
框选框需完全覆盖标定球,且标定球上下左右方向上各留有一个标定球直径的余量。若框选后提示“定位失败”,可尝试适当扩大框选范围,重新框选标定球。
-
对于新增的自定义拍照点,需单击
 ,然后输入机器人法兰位姿。
,然后输入机器人法兰位姿。
标定球拍照点创建完成后,单击下一步,采集基准数据。
采集基准数据
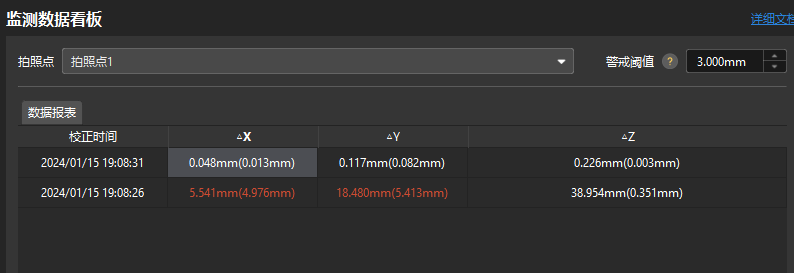
在顶部的下拉列表中选择拍照点,然后将机器人移动到拍照点对应的机器人法兰位姿处,最后单击右上角验证,对各个拍照点进行验证,统计标定球位姿的重复精度。

|
至此,已完成了部署向导,单击保存对已部署的内容进行保存。
保存部署内容后,Mech-Vision工程列表中将自动创建漂移校正工程(每个拍照点对应一个漂移校正工程),用于校正 EIH 视觉系统的漂移。
编写机器人程序
在实际生产过程中,需编写机器人程序,令机器人定期移动到对应的拍照点,对标定球进行拍照,采集标定球位姿数据,并根据标定球基准位姿数据,生成系统漂移校正信息。
为了方便快速编写机器人程序,以川崎机器人为例,梅卡曼德提供了机器人样例程序,如下所示。
以两个拍照点为例,运行该样例程序后,机器人将移动到对应的拍照点,触发Mech-Vision工程运行,对标定球进行拍照,采集标定球位姿数据。
.PROGRAM Calib_Move()
ACCURACY 1 ALWAYS
SPEED 100 MM/S ALWAYS
JMOVE STAND_BY
;layer 1
LMOVE CALIB[1]
BREAK
CALL MM_START_VIS(1,0,1,.#start_vis)
TWAIT 3
;layer 2
LMOVE CALIB[2]
BREAK
CALL MM_START_VIS(2,0,1,.#start_vis)
TWAIT 3
JMOVE STAND_BY
.END样例程序中各步骤说明如下表所示。
| 序号 | 步骤 | 程序 | 说明 |
|---|---|---|---|
1 |
定义程序名称 |
.PROGRAM Calib_Move() |
该步骤定义了名为“Calib_Move”的程序。 |
2 |
设置机器人移动相关的参数 |
ACCURACY 1 ALWAYS SPEED 100 MM/S ALWAYS |
该步骤定义了机器人的移动精度为 1,移动速度为 100 mm/s。 |
3 |
移动到拍照点 1,采集标定球位姿数据。 |
LMOVE CALIB[1] BREAK CALL MM_START_VIS(1,0,1,.#start_vis) TWAIT 3 |
该步骤令机器人移动到拍照点 1,触发Mech-Vision工程 1 运行,对标定球进行拍照,计算标定球位姿。 |
4 |
移动到拍照点 2,采集标定球位姿数据。 |
LMOVE CALIB[2] ;move to calib point #2 BREAK CALL MM_START_VIS(2,0,1,.#start_vis) TWAIT 3 |
该步骤令机器人移动到拍照点 2,触发Mech-Vision工程 2 运行,对标定球进行拍照,计算标定球位姿。 |