点群変換
使用シーン
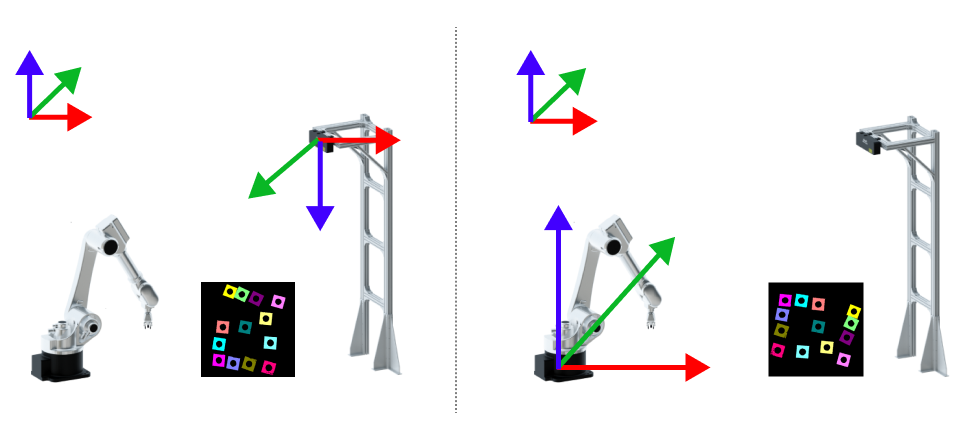
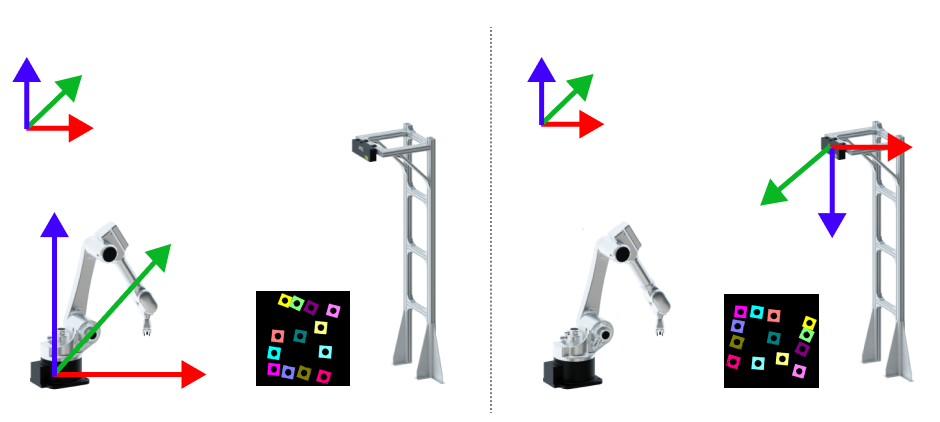
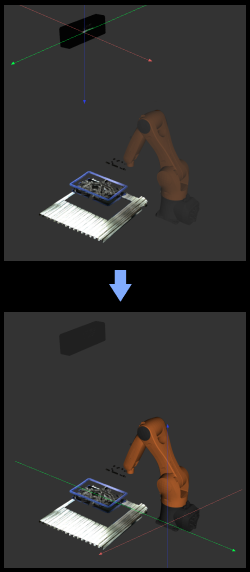
通常、点群がカメラ座標系とロボット座標系との間の相互変換に使用されます。
プロジェクトで直行ロボットが使用されている場合、点群変換(直行ロボット) ステップを使用する必要があります。
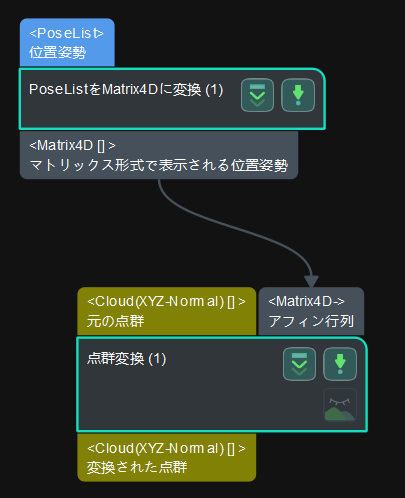
入力と出力
パラメータ説明
変換設定
| パラメータ | 説明 |
|---|---|
変換方法 |
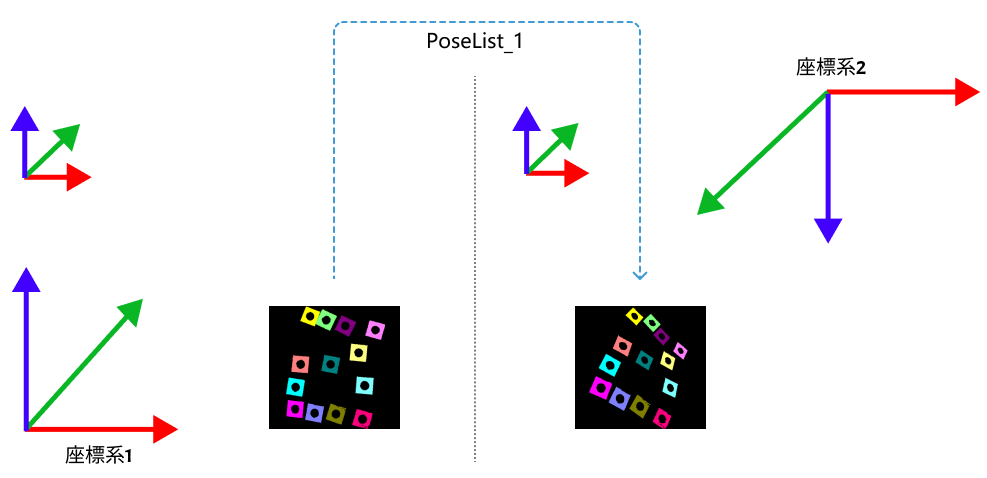
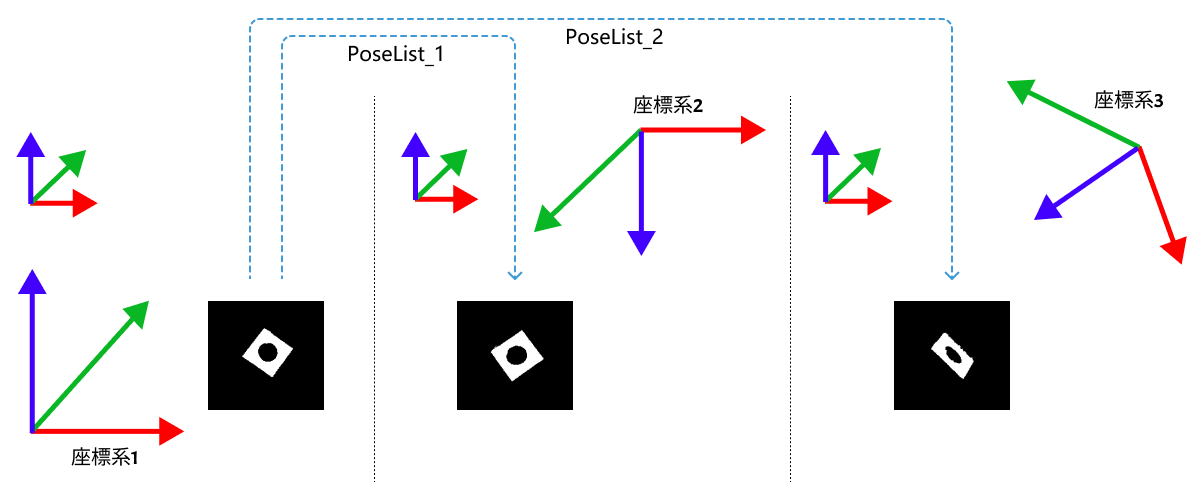
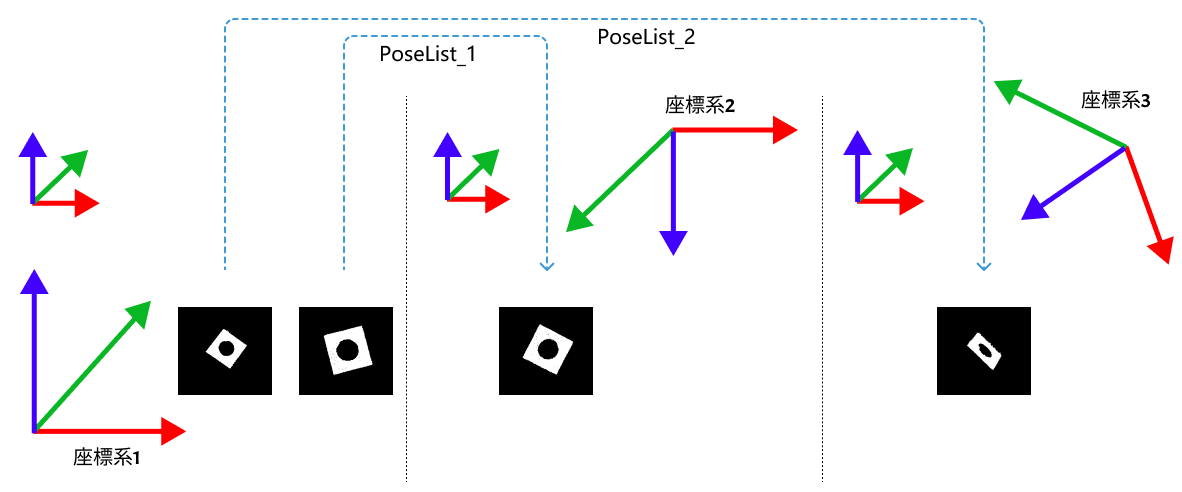
パラメータ説明:このパラメータは、点群の変換方法を設定するために使用されます。 初期値:CameraToRobot オプション:CameraToRobot、RobotToCamera、AllWithFirst、FirstWithAll、UseCorrespondenceInput、AffineTransform 調整説明:
|