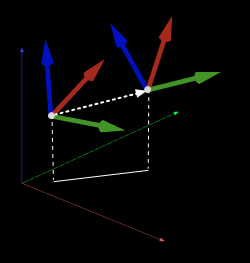
位置姿勢間の距離を計算
パラメータ説明
| パラメータ | 説明 |
|---|---|
距離の種類 |
パラメータ説明: 距離の計算方法を設定します。 オプション:
初期値:Dis2ReferencePose |
基準位置姿勢 |
パラメータ説明:距離計算時に使用する基準位置姿勢を設定します。
初期値:X値=0.0000、Y値=0.0000、Z値=0.0000 |
| パラメータ | 説明 |
|---|---|
距離の種類 |
パラメータ説明: 距離の計算方法を設定します。 オプション:
初期値:Dis2ReferencePose |
基準位置姿勢 |
パラメータ説明:距離計算時に使用する基準位置姿勢を設定します。
初期値:X値=0.0000、Y値=0.0000、Z値=0.0000 |