推論設定ツール
概要
画面
推論設定ツールの画面を下図に示します。
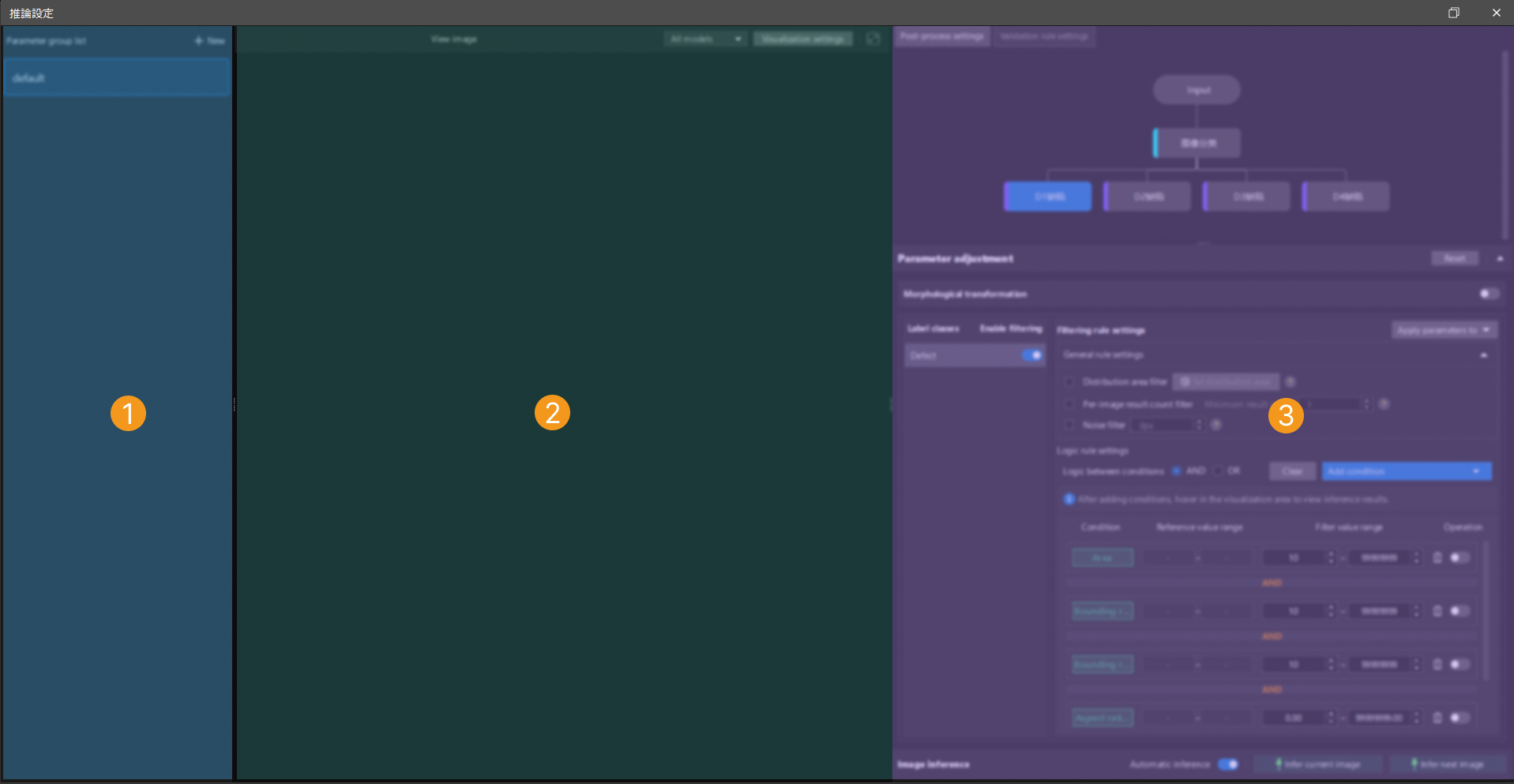
各機能エリアの説明は下表の通りです。
| 番号 | 機能エリア | 説明 |
|---|---|---|
1 |
パラメータグループリスト |
現在作成されているパラメータグループを表示します。新規作成、削除、コピー作成、グループ切り替えが可能で、異なるシーンに応じた推論設定の管理に使用します。 |
2 |
画像可視化 |
モデルの推論結果を表示します。「可視化設定」でラベルの文字色や各クラスのマスク色を設定可能です。複数モデルパッケージを使用する場合は、可視化エリア上部で選択済みモデルまたは全モデルを切り替えて表示範囲を変更できます。 |
3 |
推論設定 |
推論結果の処理ロジックを設定するエリアで、後処理設定および検証ルール設定を行います。
|
推論設定手順
以下の手順に従って推論設定を行うことができます。
-
推論設定ツールを開いたら、新規パラメータグループを作成するか、既存のグループを選択して編集を開始します。
-
右側のパラメータ調整エリアの 後処理設定 タブで、現在のモデルタイプに応じた重要なパラメータを調整します。調整中は左側の可視化エリアで変化を確認し、リアルタイムでパラメータ調整の結果を検証します。
-
複数モデルパッケージを使用する場合、検証ルール設定 タブに切り替え、複数モデルの結果間の論理関係を定義します。
-
可視化エリア上部の 可視化設定 をクリックし、各ラベルクラスのマスク色やラベル文字色を設定します。これにより、推論結果の区別が容易になります。
-
設定が完了したら 保存 をクリックします。システムは現在のパラメータグループの設定を、自動的に該当パラメータグループを使用する推論ステップに適用します。
後処理設定
後処理設定画面を下図に示します。
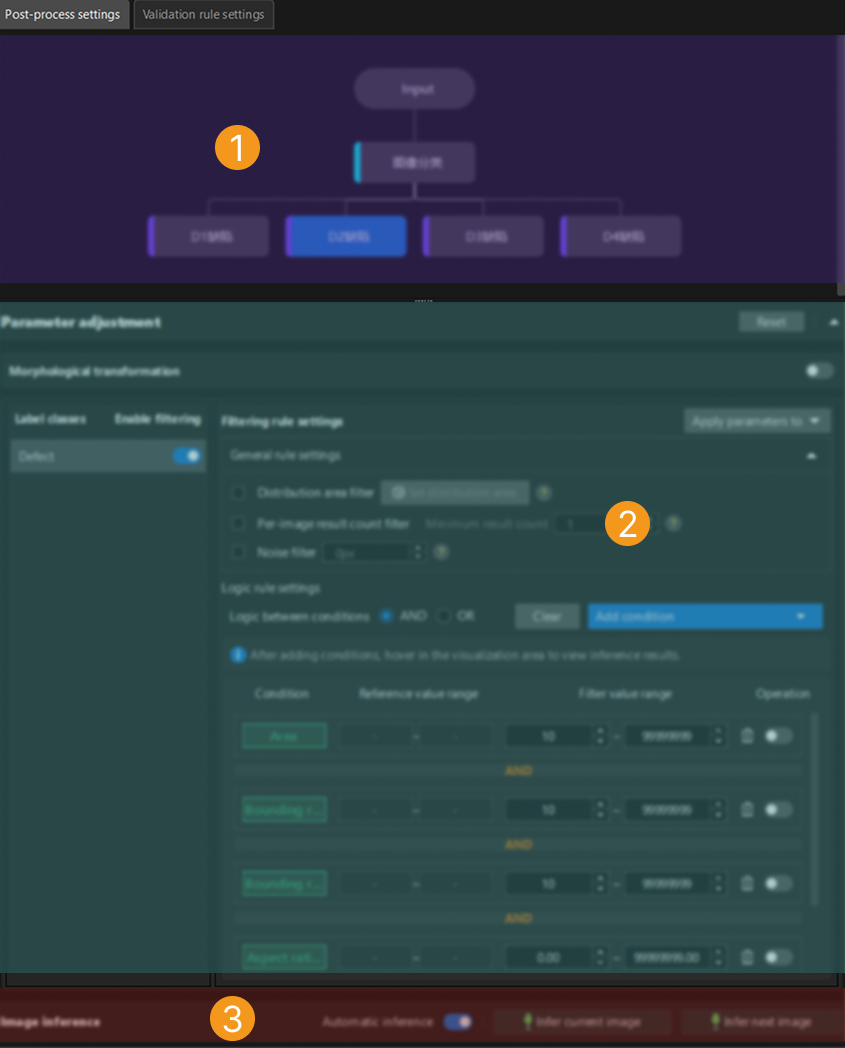
各機能エリアの説明は下表の通りです。
| 番号 | 機能エリア | 説明 |
|---|---|---|
1 |
モデルナビゲーション |
インポートしたモデルパッケージに含まれるモデルを表示します。複数モデルパッケージの場合は、異なるモデルをクリックして対応する後処理パラメータを切り替えて調整できます。 |
2 |
パラメータ調整 |
現在選択中のモジュールの後処理パラメータを設定します。調整後、現在の画像を推論 をクリックすると、可視化エリアで調整結果をリアルタイムに確認できます。リセット でデフォルトのパラメータ設定に戻すことも可能です。 |
3 |
画像推論 |
設定したパラメータに基づいて画像を推論し、可視化エリアで結果を確認します。デフォルトでは「自動推論」機能が有効になっています。現在の画像を推論 をクリックすると、現在のパラメータで単一画像を処理できます。次の画像を推論 をクリックすると、シーケンス内の次の画像を自動で読み込み、処理します。 |
以下では、異なるモデルパッケージ推論タスクにおける後処理パラメータについて詳しく説明します。使用するモデルパッケージの種類に応じて、該当する内容をご参照ください。
画像分類
画像分類モデルパッケージで調整可能な後処理パラメータは以下の通りです。
| パラメータ | 説明 | ||
|---|---|---|---|
信頼度しきい値 |
パラメータ説明:画像分類時の信頼度しきい値を設定します。この信頼度しきい値より大きい結果は保持されます。
|
||
CAMを生成 |
パラメータ説明:画像内のどのピクセル領域が分類結果に大きく寄与しているかを可視化します。青色は寄与が小さいことを、赤色は寄与が大きいことを示します。 調整説明:この機能を有効にすると、モデルパッケージ推論速度が低下 します。デバッグや分析用途のみに使用し、生産環境では使用しないことを推奨します。
|
欠陥セグメンテーション
欠陥セグメンテーションモデルパッケージで調整可能な後処理パラメータは以下の通りです。
モフォロジー処理
| パラメータ | 説明 |
|---|---|
モフォロジー処理 |
パラメータ説明:有効にすると、欠陥セグメンテーションマスクに対してモフォロジー処理を適用します。
|
モフォロジー処理のタイプ |
パラメータ説明:マスクに適用するモフォロジー処理方式を選択します。 オプション:膨張処理、収縮処理、オープニング処理、クロージング処理
調整説明:実際のニーズに応じて設定してください。 |
| パラメータ | 説明 | ||
|---|---|---|---|
ラベルのクラス |
パラメータ説明:Mech-DLKでトレーニング時にラベル付けされた欠陥クラス一覧を表示します。
|
||
フィルタリングを有効化 |
パラメータ説明:対応するラベルクラスに対してフィルタリングルールを適用するかどうかを指定します。
|
フィルタリングルール設定
| パラメータ | 説明 |
|---|---|
適用対象 |
パラメータ説明:設定済みのフィルタリングルールパラメータを、指定クラスまたはすべてのクラスに適用します。 |
分布領域によってフィルタリング |
パラメータ説明:汎用フィルタリングルールです。分布領域を設定すると、その領域内の推論結果のみが保持されます。「分布領域を設定」ボタンから設定します。
|
画像別結果数によってフィルタリング |
パラメータ説明:汎用フィルタリングルールです。1枚の画像内における推論結果の最小個数を設定します。結果数がこの値以上の場合のみ、その画像の推論結果を保持します。
|
ノイズフィルター |
パラメータ説明:汎用フィルタリングルールです。単一推論結果の最小面積を設定します。この面積より小さい結果は除去されます。
|
条件間のロジック |
パラメータ説明:論理フィルタリングルールです。追加した複数のフィルタリング条件(面積、外接矩形の横縦比、円形度など)に対して、条件間の論理関係(AND/OR)を一括で設定します。異なる条件項目は「条件間ロジック」(AND/OR)に従って組み合わされます。同じ条件項目を複数回追加した場合は、常に OR で組み合わされ、「条件間ロジック」の設定による影響は受けません。
|
|
インスタンスセグメンテーション
インスタンスセグメンテーションモデルパッケージで調整可能な後処理パラメータは以下の通りです。
| パラメータ | 説明 |
|---|---|
モフォロジー処理 |
パラメータ説明:有効にすると、インスタンスセグメンテーションマスクに対してモフォロジー処理を適用します。
|
モフォロジー処理のタイプ |
パラメータ説明:マスクに適用するモフォロジー処理方式を選択します。 オプション:膨張処理、収縮処理、オープニング処理、クロージング処理
調整説明:実際のニーズに応じて設定してください。 |
信頼度しきい値 |
パラメータ説明:インスタンスセグメンテーションに使用する信頼度しきい値を設定します。この信頼度しきい値より大きい結果は保持されます。 調整説明:実際のニーズに応じて設定してください。 |
対象物検出
対象物検出モデルパッケージで調整可能な後処理パラメータは以下の通りです。
| パラメータ | 説明 |
|---|---|
信頼度しきい値 |
パラメータ説明:対象物検出に使用する信頼度しきい値を設定します。この信頼度しきい値より大きい結果は保持されます。 調整説明:実際のニーズに応じて設定してください。 |
テキスト検出
テキスト検出モデルパッケージで調整可能な後処理パラメータは以下の通りです。
| パラメータ | 説明 |
|---|---|
テキストの並べ替え順序 |
パラメータ説明:テキスト検出結果の並び順を指定します。後続のテキスト認識や表示順序に影響します。
|
フィルタリングルール設定
| パラメータ | 説明 |
|---|---|
フィルタリングルール設定 |
パラメータ説明:テキスト検出結果に対して追加のフィルタリングを行います。フィルタリングルールは、共通ルールとロジックルールの2種類で構成されます。フィルタリングルールを適切に設定することで、テキスト検出の精度を向上させ、誤検出や見逃し検出を低減できます。 |
信頼度しきい値 |
パラメータ説明:汎用フィルタリングルールです。テキスト検出に使用する信頼度しきい値を設定します。この信頼度しきい値より大きい結果は保持されます。
|
条件間のロジック |
パラメータ説明:論理フィルタリングルールです。追加した複数のフィルタリング条件(面積、外接矩形の横縦比、円形度など)に対して、条件間の論理関係(AND/OR)を一括で設定します。異なる条件項目は「条件間ロジック」(AND/OR)に従って組み合わされます。同じ条件項目を複数回追加した場合は、常に OR で組み合わされ、「条件間ロジック」の設定による影響は受けません。
|
|
テキスト認識
テキスト認識モデルパッケージで調整可能な後処理パラメータは以下の通りです。
| パラメータ | 説明 | ||
|---|---|---|---|
テキストの結合 |
パラメータ説明:有効にすると、認識されたテキストを連結処理できます。
|
||
区切り文字 |
パラメータ説明:テキストを連結する際の区切り文字を選択します。
|
||
テキストを変更 |
パラメータ説明:認識結果に含まれるテキストを任意に編集します。複数の編集方式に対応しており、さまざまなテキスト処理ニーズに対応できます。 オプション:文字置換、指定位置の文字置換
調整説明:+ をクリックし、テキスト編集方式を選択します。
|
検証ルール設定(複数モデルパッケージ)
複数モデルが連携して動作するシーンでは、単一モデルの結果だけでは最終判定を行えない場合があります。「検証ルール設定」では、複数モデルの結果間の論理関係を定義し、最終判定結果(OK / NG)を生成できます。
|
検証ルールは、複数モデルパッケージ を使用してディープラーニング推論を行う場合にのみ設定が必要です。単一モデルパッケージを使用する場合、この設定画面は表示されません。 |
検証ルールの説明
検証ルール設定 タブで検証ルールを設定します。各判定結果間は AND/OR によるロジカルな組み合わせが可能です。OK はその項目が適合(期待通り)であること、NG は不適合(期待外れ)であることを示します。
-
AND:選択されたすべてのルールが、それぞれの判定基準を満たした場合にのみ、最終判定結果は OK となります。
-
OR:選択されたルールのうち、いずれか1つでも判定基準を満たした場合、最終判定結果は OK となります。
判定基準:特定の状況が発生した場合に、適合(OK)か不適合か(NG)を設定します。
判定結果:設定された判定基準に基づいて得られた判定結果を表示します。
検証プロセス:システムはまず、チェックを入れた各検証ルールに対して個別に判定を行い、対応する判定結果を得ます。その後、設定された論理関係(AND / OR)に基づいて各ルールの結果を組み合わせ、現在の画像に対する最終判定結果を出力します。
検証ルール設定手順
-
推論設定エリアで 検証ルール設定 タブをクリックします。
-
複数モデル間の論理関係(AND または OR)を選択します。
-
リストから判定に使用するルールにチェックを入れ、各ルールの判定基準を定義します。
-
設定した判定基準に基づき、最終判定結果が期待通りであることを確認します。問題がなければ、保存 をクリックして検証ルールをパラメータグループに保存します。
理解しやすいよう、以下では2つの使用例を用いて上記の手順を説明します。
使用例 1
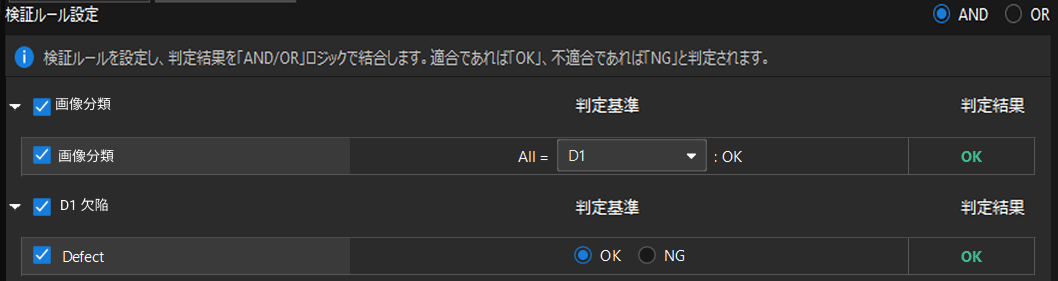
下図は、画像内で D1コネクタ筐体とD1不良コネクタ筐体の傷の両方を同時に検出したい場合 を例として、検証ルールの設定方法を示しています。
-
検証ルールを設定し、判定結果間の論理関係として 「AND」 を選択します。
-
各モデルの判定基準を設定し、判定結果を確認します。
-
画像分類モデルの判定基準を「All = D1:OK」に設定します。つまり、現在の画像内のすべての分類結果が D1 コネクタ筐体である場合、期待通りと判定され、判定結果は OK となります。
-
欠陥セグメンテーションモデルの判定基準を「OK」に設定します。つまり、現在の画像内にコネクタ筐体の傷が存在する場合、期待通りと判定され、判定結果は OK となります。
-
-
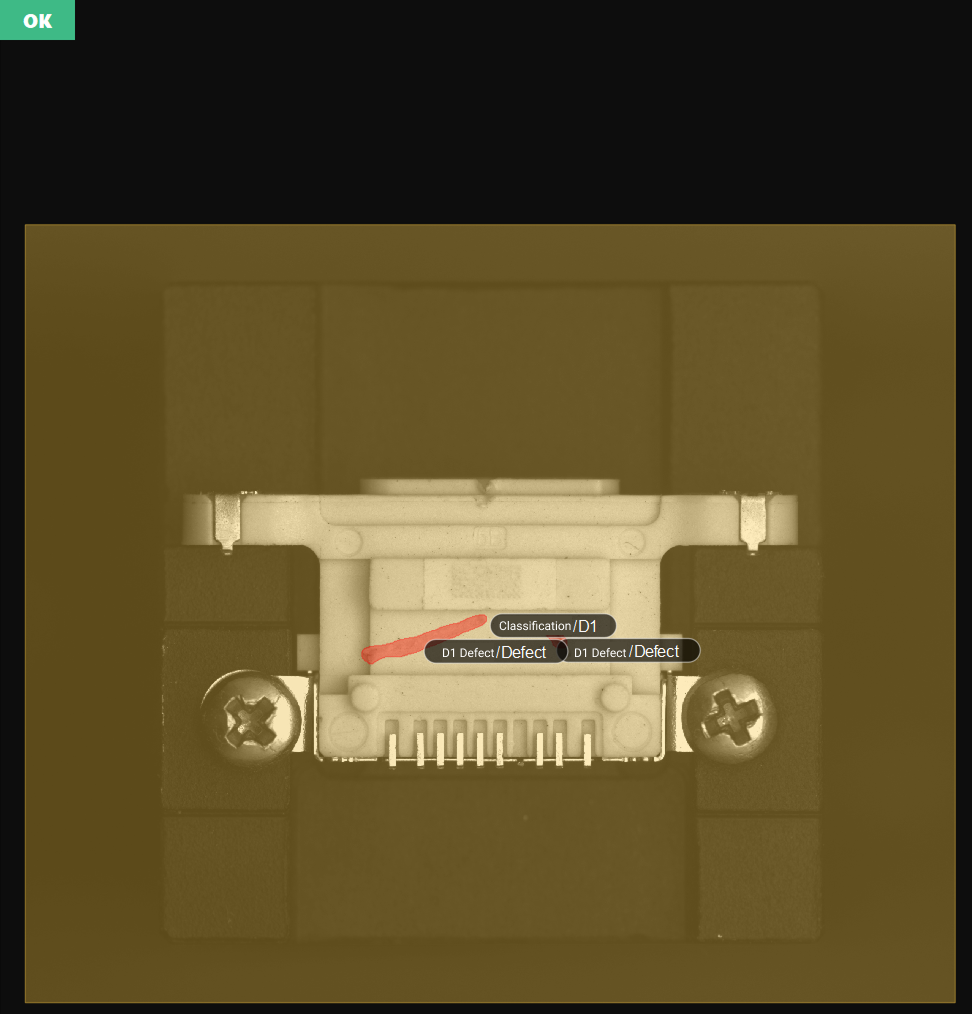
2つのモデルの判定結果がいずれも OK の場合、可視化エリア左上に最終判定結果として OK が表示されます。
使用例 2
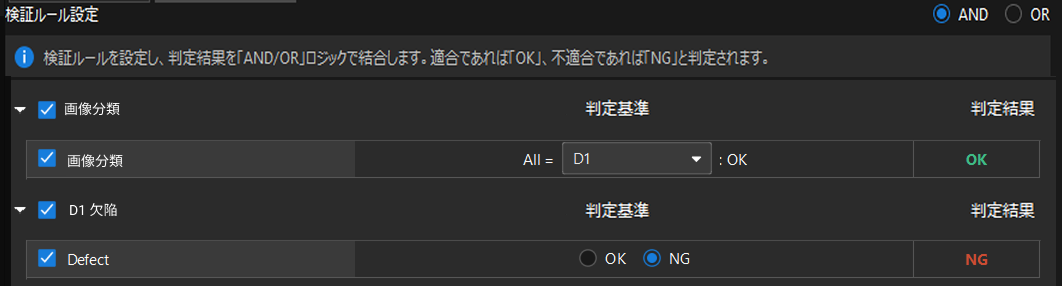
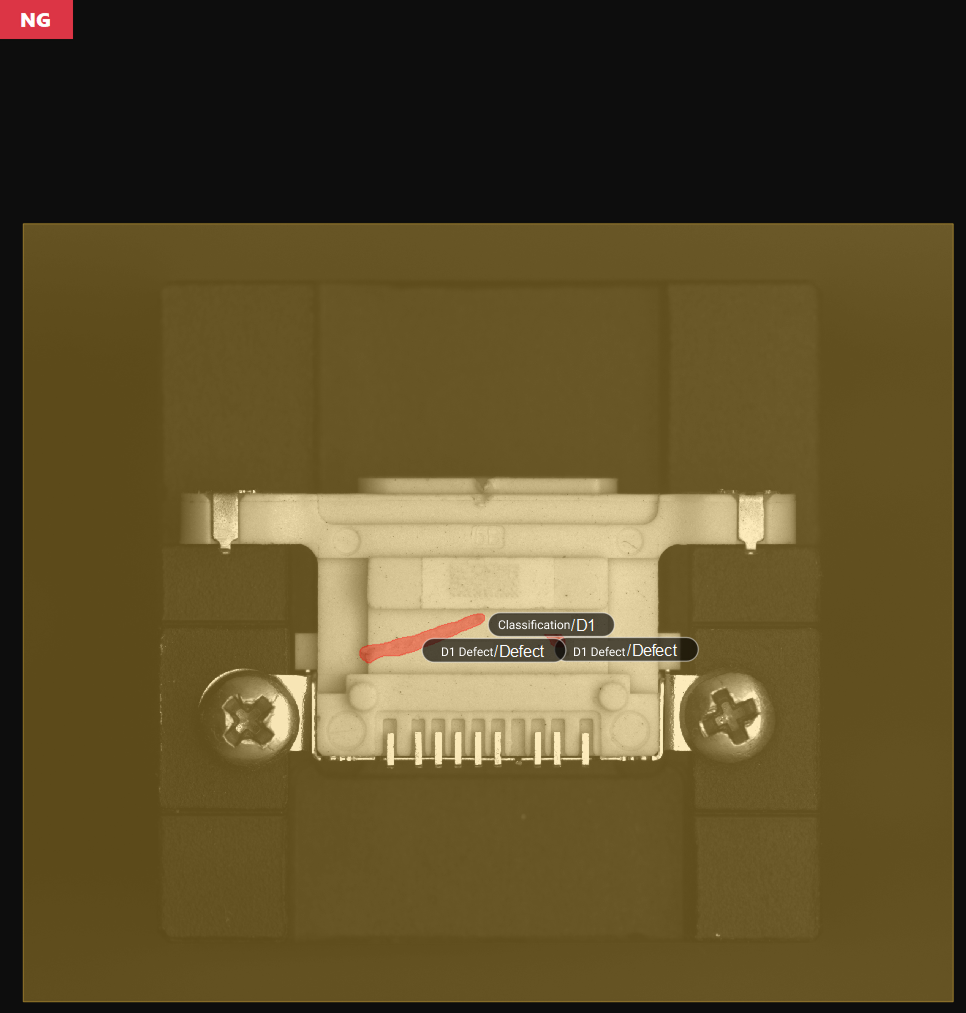
下図は、画像内で D1コネクタ筐体は検出したい一方、D1不良コネクタ筐体の傷は存在してほしくない場合 を例として、検証ルールの設定方法を示しています。
-
検証ルールを設定し、判定結果間の論理関係として 「AND」 を選択します。
-
各モデルの判定基準を設定し、判定結果を確認します。
-
画像分類モデルの判定基準を「All = D1:OK」に設定します。つまり、現在の画像内のすべての分類結果が D1 コネクタ筐体である場合、期待通りと判定され、判定結果は OK となります。
-
欠陥セグメンテーションモデルの判定基準を「NG」に設定します。つまり、現在の画像内にコネクタ筐体の傷が存在する場合、期待外と判定され、判定結果は NG となります。
-
-
画像分類モデルの判定結果が OK、欠陥セグメンテーションモデルの判定結果が NG の場合、可視化エリア左上に最終判定結果として NG が表示されます。
参考情報
フィルター条件の説明
| 条件 | 説明 |
|---|---|
基本オプション |
|
面積 |
個々の認識対象領域の総ピクセル数。サイズが大きすぎる、または小さすぎる対象をフィルタリングします。 |
総面積 |
現在の検出領域内におけるすべての認識対象のピクセル数の合計。対象の総カバー範囲を制限し、過剰検出または広範囲な対象群を回避します。 |
外接矩形の高さ |
対象の軸合わせ外接矩形の高さ(ピクセル)。すなわち、座標軸に平行な最小長方形の高さ。対象の垂直方向における最大または最小スパンをフィルタリングします。 対象が傾いていない場合や、軸に沿って整列しているシーンに適しています。対象が傾いている場合、この値は実際の高さよりも大きくなる可能性があります。 |
外接矩形の幅 |
対象の軸合わせ外接矩形の幅(ピクセル)。すなわち、座標軸に平行な最小長方形の幅。対象の水平方向における最大または最小スパンをフィルタリングします。対象が傾いていない場合や、軸に沿って整列しているシーンに適しています。対象が傾いている場合、この値は実際の幅よりも大きくなる可能性があります。 |
外接矩形の横縦比 |
対象の軸合わせ外接矩形の長辺と短辺の比率。異なる形状の対象を区別します(例:細長いキズと円形の凹み)。 |
主軸角度 |
対象の主軸と水平方向のなす角(度)。特定の方向性を持つ対象をフィルタリングします。 |
詳細オプション |
|
真円度 |
対象物の形状が真円にどの程度近いかを表します。値が1に近いほど形状は円形に近くなります。円形対象(ネジ穴など)と、不規則形状の対象(ひび割れや汚れなど)を区別します。 |
外接矩形の中心 X |
軸合わせ外接矩形の中心点の X 座標。画像内の対象の水平位置をフィルタリングします。 |
外接矩形の中心 Y |
軸合わせ外接矩形の中心点の Y 座標。画像内の対象の垂直位置をフィルタリングします。 |
内接円の半径 |
対象の内部に完全に収まる最大円の半径。対象の「詰まり具合」や最小の貫通穴サイズを評価し、内部に空洞があるものや形状が不完全な対象を除去します。 |
外接円の半径 |
対象全体を完全に囲む最小の円の半径。対象の最大外形寸法をフィルタリングするために用いられます(例:円形ワークの大まかな位置決めや寸法上限のフィルタリング)。 |
内接矩形の幅 |
対象の内部に完全に収まる最大矩形の幅。対象物内部の有効領域における横方向の寸法をフィルタリングし、エッジの欠けが著しい物体を除去します。 |
内接矩形の高さ |
対象の内部に完全に収まる最大矩形の幅。対象物内部の有効領域における縦方向の寸法をフィルタリングし、エッジの欠けが著しい物体を除去します。 |
重心 X |
対象領域のグレースケールまたは幾何重心の画像座標系における横方向位置。幾何学的中心と比べて、実物のコア位置をより適切に反映します。画像の特定の水平領域内に存在する対象をフィルタリングします。 |
重心 Y |
対象領域のグレースケールまたは幾何重心の画像座標系における縦方向位置。幾何学的中心と比べて、実物のコア位置をより適切に反映します。画像の特定の垂直領域内に存在する対象をフィルタリングします。 |
外接矩形の左上 X |
対象の軸合わせ外接矩形の左上角の X 座標。画像内における対象の水平方向の開始位置をフィルタリングします。 |
外接矩形の左上 Y |
対象の軸合わせ外接矩形の左上角の Y 座標。画像内における対象の垂直方向の開始位置をフィルタリングします。 |
外接矩形の右下 X |
対象の軸合わせ外接矩形の右下角の X 座標。画像内における対象の水平方向の終了位置をフィルタリングします。 |
外接矩形の右下 Y |
対象の軸合わせ外接矩形の右下角の Y 座標。画像内における対象の垂直方向の終了位置をフィルタリングします。 |
回転外接矩形の幅 |
対象の最小面積外接矩形の幅(ピクセル)。任意の角度に回転可能、対象の実際の形状により適合します。対象が傾いている場合の幅のフィルタリングに適しています。 |
回転外接矩形の高さ |
対象の最小面積外接矩形の高さ(ピクセル)。任意の角度に回転可能、対象の実際の形状により適合します。対象が傾いている場合の高さのフィルタリングに適しています。 |
|
軸合わせ外接矩形とは、4辺が画像座標軸(水平/垂直方向)と厳密に平行な最小の外接矩形を指します。 |