2D点を3D位置姿勢に変換
機能
2Dカメラで認識した2D位置姿勢または2D形状を、カメラ外部パラメータおよびティーチング位置姿勢と組み合わせて、ロボット座標系下の3Dワーク位置姿勢へ変換します。
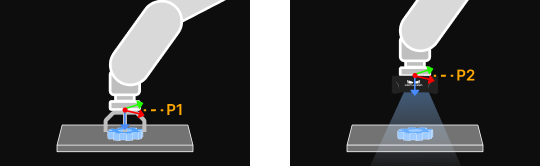
図の左側はティーチングされた基準把持姿勢(P1)、右側はティーチングされた撮影時のフランジ姿勢(P2)を示します。
パラメータ説明
| パラメータ | 説明 |
|---|---|
入力タイプ |
パラメータ説明: 入力データタイプを指定します。ワークの2D位置姿勢とワークの2D形状の2種類があります。 |
カメラステップを選択 |
パラメータ説明: 外部パラメータのキャリブレーションが完了した2Dカメラステップを選択し、キャリブレーションデータが現在のステップに正しく適用されるようにします。 |
基準ワークの2D位置姿勢 |
パラメータ説明: 撮影時に認識された基準ワークの2D位置姿勢です。通常、前ステップからこの入力ポートへ出力されるデータフローから取得します。 |
基準把持位置姿勢 |
パラメータ説明: ロボットが基準ワークを把持するときのフランジ位置姿勢です。ティーチペンダントで読み取った、ロボット座標系下のフランジ位置姿勢です。 |
撮影時のフランジ位置姿勢 |
パラメータ説明: Eye in Hand シーンで、ロボットが撮影位置で基準ワークを撮影するときのフランジ位置姿勢です。ティーチペンダントで読み取った、ロボット座標系下のフランジ位置姿勢です。 |
パラメータからフランジ位置姿勢を取得 |
パラメータ説明: 通信サービスを有効にすると、この機能は自動的に無効になり、入力されたロボットフランジ位置姿勢は使用されません。 調整説明: ロボットフランジ位置姿勢を再入力する場合は、通信サービスを無効にしてからこのパラメータを再度有効にしてください。 |
撮影時のフランジ位置姿勢 |
パラメータ説明: 実際の撮影時のロボットフランジ位置姿勢を入力します。 |
通信コンポーネント内のロボットサービス名 |
パラメータ説明: ロボット型番を入力します。通信コンポーネントで接続されているロボット型番と一致している必要があります。 |