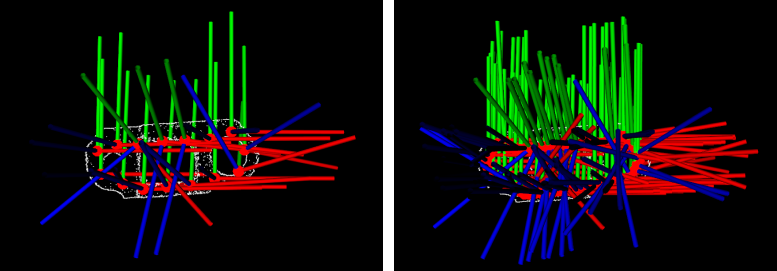
輪郭から経路を生成
使用シーン
通常、長方形のドア/ガラスなど、エッジ接着のシーンで使用されます。
実際の運用では、撮影角度や照明条件などの影響により、点群の欠損やノイズの増加が発生することがあります。その結果、生成される経路の始点が変化したり、理想的な経路からずれたりする可能性があります。そのため、このステップは経路生成の補助ツールとして使用することを推奨します。
同種の対象物に対して安定した経路を取得する場合は、以下の手順を推奨します。
-
対象物の点群とこのステップを使用して初期経路を生成し、経路点を調整します。
-
対象物の点群を点群モデルとして使用し、調整された経路点を点群モデルの複数の把持位置姿勢として使用し、点群モデルに対象物中心点を設定します。
-
点群モデルと対象物中心点を使用して対象物の3Dマッピングを行い、対象物の把持位置姿勢を取得します。その後、「複数の把持位置姿勢にマッピング」ステップを使用して対象物の複数の把持位置姿勢を取得して、安定した経路を取得します。
パラメータ説明
一般設定
| パラメータ | 説明 |
|---|---|
マスククロージング処理のカーネルサイズ |
パラメータ説明:マスクのクロージング処理に使用するカーネルサイズを設定します。単位はピクセル(px)です。
|
輪郭点サンプリング間隔 |
パラメータ説明:このパラメータは、生成された経路点の間隔(ピクセル単位)を設定するために使用されます。値が小さいほど経路点は密になり、値が大きいほど疎になります。調整の効果を 調整例 に示します。
|
エッジのスケーリング方法 |
パラメータ説明:経路点生成時の点群エッジのスケーリング方法を選択します。 オプション:収縮、エッジポイントへの接線の垂直方向に沿ったスケーリング
初期値:エッジポイントへの接線の垂直方向に沿ったスケーリング |
収縮カーネルサイズ |
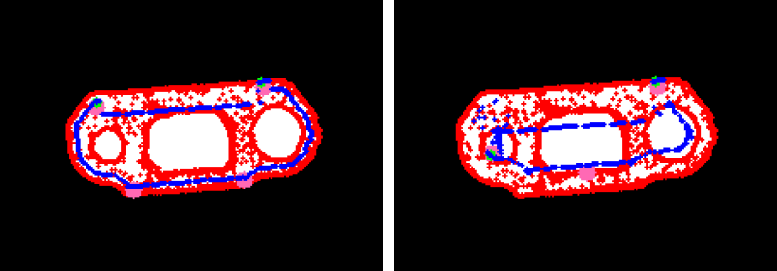
パラメータ説明:エッジのスケーリング方法 が 収縮 の場合に有効です。経路のオフセット量と方向を設定します。単位はピクセル(px)です。正の値の場合は経路がワーク輪郭の内側へ収縮し、値が大きいほど収縮量も大きくなります。負の値の場合は経路がワーク輪郭の外側へ拡張し、値が小さいほど拡張量も大きくなります。調整の効果を 調整例 に示します。
|
垂直方向の移動距離 |
パラメータ説明:エッジのスケーリング方法 が エッジポイントへの接線の垂直方向に沿ったスケーリング の場合に有効です。経路を垂直方向へ移動する距離を設定します。単位はミリメートル(mm)です。正の値の場合は経路がワーク輪郭の内側へ収縮し、値が大きいほど収縮量も大きくなります。負の値の場合は経路がワーク輪郭の外側へ拡張し、値が小さいほど拡張量も大きくなります。調整の効果を 調整例 に示します。
|
ポイント平滑化
| パラメータ | 説明 |
|---|---|
ガウシアンフィルタを使用 |
パラメータ説明:エッジ点群に対してガウシアンフィルタによる平滑化処理を行うかどうかを設定します。
|
ガウシアンフィルタ半径 |
パラメータ説明:ガウシアンフィルタの適用半径を設定します。単位はピクセル(px)です。
|
ガウシアンフィルタ標準偏差 |
パラメータ説明:ガウシアンフィルタ標準偏差(Sigma)を設定します。
|
特殊辺の収縮
このパラメータ群は特定のプロジェクト向けです。通常は調整不要です。
| パラメータ | 説明 |
|---|---|
特殊辺収縮を使用 |
パラメータ説明:特殊エッジ収縮処理を有効にするかどうかを設定します。
|
接線距離計算間隔 |
パラメータ説明:接線距離を計算する際の間隔を設定します。
|
特殊辺収縮の実距離 |
パラメータ説明:特殊エッジ収縮処理の実際の処理距離を設定します。単位はミリメートル(mm)です。
|
コーナー検出
| パラメータ | 説明 |
|---|---|
コーナーサンプリング間隔 |
パラメータ説明:対象物のエッジポイントに対するダウンサンプリング間隔を設定します。単位はピクセル(px)です。ダウンサンプリングによりコーナー検出性能が向上します。
|
信頼度 |
パラメータ説明:コーナー検出の信頼度しきい値を設定します。設定範囲は 0.0~1.0 です。値が大きいほど高品質なコーナーのみが検出されます。
|
最小コーナー距離 |
パラメータ説明:隣接するコーナー間の最小距離を設定します。単位はピクセル(px)です。
|
最大コーナー数 |
パラメータ説明:対象物エッジ上で検出するコーナー数の上限を設定します。
|
ブロックサイズ |
パラメータ説明:コーナー検出時のブロックサイズを設定します。ワーク点群エッジが不明瞭な領域でのコーナー検出に使用されます。
|
Harris検出器を使用 |
パラメータ説明:Harris検出器を使用してコーナーを検出するかどうかを設定します。チェックを入れた場合、Harris応答係数 K を設定する必要があります。
|
Harris応答係数 K |
パラメータ説明:Harris検出器の応答係数 K を設定します。Harris検出器を使用 が有効な場合のみ有効です。
|
調整例
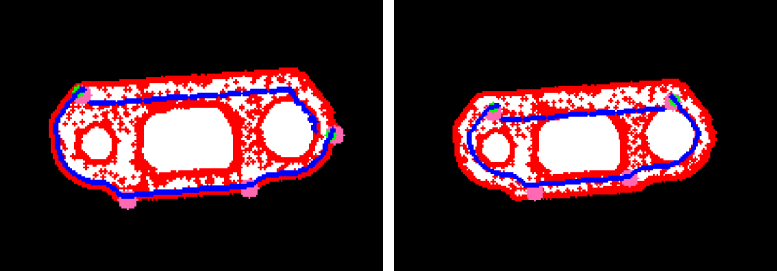
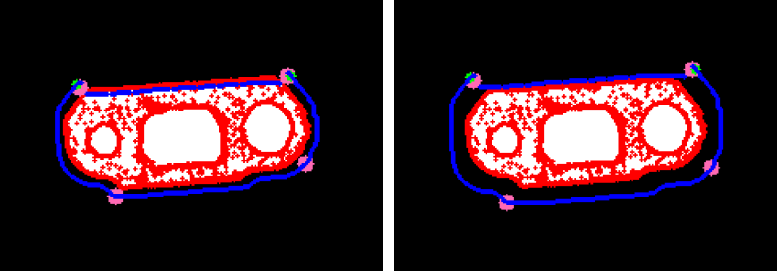
輪郭点サンプリング間隔
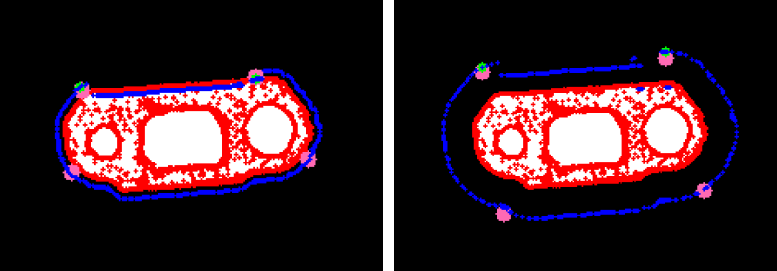
輪郭点サンプリング間隔 をそれぞれ 20 と 5 に設定した場合、生成される経路点は以下のようになります。
左側のは 20 に設定した場合の効果で、経路点がまばらになっています。右側のは 5 に設定した場合の効果で、経路点はより密になります。