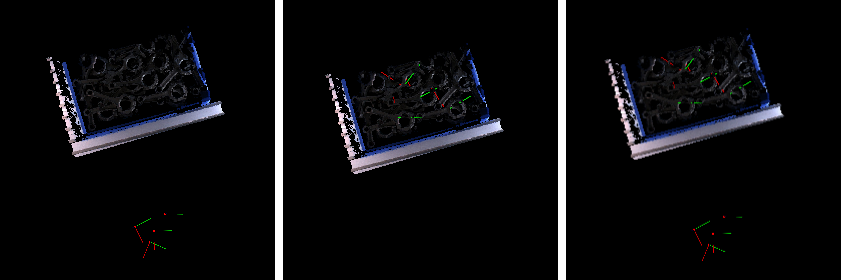
四元数と並進ベクトルから位置姿勢を合成 現在ご覧いただいているのは最新版の内容です(V2.2.0)。異なるバージョンを参照する場合は、画面右上のボタンから切り替えが可能です。 ■ ご利用中のバージョンが分からない場合や、サポートが必要な場合はお気軽にサポート窓口までご連絡ください。 機能 回転ベクトル(四元数)と並進ベクトルを組み合わせて位置姿勢に合成します。 使用シーン 汎用の位置姿勢作成ステップです。特定の使用シーンはありません。 入力と出力 入力 入力ポート データ型 説明 回転ベクトル Quaternion[] このポートに入力される回転ベクトル(四元数)は位置姿勢を合成するために使用されます。 位置姿勢の中心 Vector3D[] このポートに入力される位置姿勢の中心(並進ベクトル)は位置姿勢を合成するために使用されます。 出力 出力ポート データ型 説明 合成された位置姿勢 Pose[] 入力された回転ベクトルと位置姿勢の中心で合成された位置姿勢。 パラメータ説明 パラメータ 説明 位置姿勢表示の設定 パラメータ説明:このパラメータは、位置姿勢の表示形式を設定するために使用されます。 初期値:出力位置姿勢のみを表示 オプション:出力位置姿勢のみを表示、入力位置姿勢のみを表示、入力と出力位置姿勢をすべて表示 調整説明:実際のニーズに応じて選択してください。調整効果を 調整の例 に示します。 調整例 位置姿勢表示の設定 カメラ座標系を例として、出力位置姿勢のみを表示、入力位置姿勢のみを表示、入力と出力を全て表示 を選択した場合の位置姿勢表示効果は下図のようになります。 この情報は役に立ちましたか? フィードバックを送信 ありがとうございます! ご意見・ご要望がございましたら、以下よりお寄せください: オンラインコミュニティ フィードバックフォーム 3Dベクトルの長さを計算 軸と角度から回転ベクトルを合成