軌跡を調整
軌跡をマージ
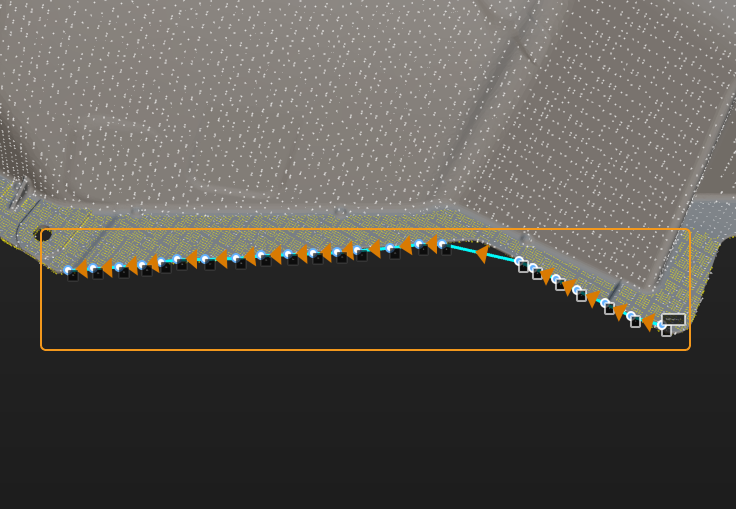
ロボットが複数の軌跡上で連続して移動し、ワーク表面から離れることやロボットハンドを切り替える必要がない場合、軌跡をマージすることで対応できます。
複数の先頭と末尾が接続された軌跡を1本の連続した軌跡にマージすることで、ロボットは作業中にワーク表面から離れることなく連続的に動作できます。
-
軌跡を作成します。
ワーク上に少なくとも2本の軌跡が存在することを確認してください。
-
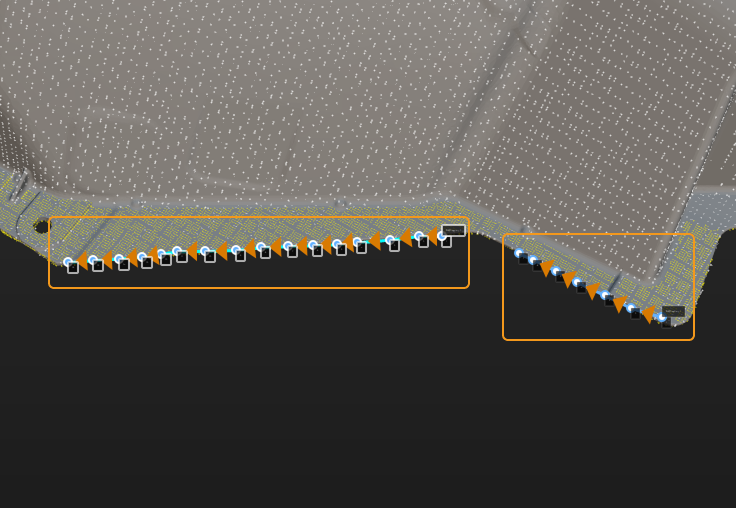
軌跡をマージ
軌跡リストで任意の軌跡を選択し、軌跡をマージ をクリックしてマージしたい軌跡を選択し、最後に 適用 をクリックすると、2本の軌跡がマージされます。
軌跡マージ時、各軌跡は首尾が連結され、1本の軌跡として結合されます。
軌跡点を追加
軌跡点の追加方法は以下の通りです。
-
軌跡リストで任意の軌跡点を選択します。
-
軌跡点の右側の
 ボタンをクリックし、ショートカットメニューで 軌跡点を追加 を選択すると、選択した軌跡点の後に新しい軌跡点を追加できます。
ボタンをクリックし、ショートカットメニューで 軌跡点を追加 を選択すると、選択した軌跡点の後に新しい軌跡点を追加できます。
軌跡線を分割
軌跡線の分割方法は以下の通りです。
-
軌跡リストで任意の軌跡点を選択します。
-
軌跡点の右側の
ボタンをクリックし、ショートカットメニューで 軌跡線を分割 を選択すると、選択した軌跡点から軌跡線を分割できます。該当の軌跡点および以降の軌跡点は新しい軌跡線として分割されます。
軌跡点を開始点に設定して並べ替え
軌跡点を開始点に設定して再並べ替える方法は以下の通りです。
-
軌跡リストで任意の軌跡点を選択します。
-
軌跡点の右側の
ボタンをクリックし、ショートカットメニューで 開始点に設定して並べ替え を選択すると、選択した軌跡点が軌跡線の起点になり、その前の点は軌跡線の末尾に配置されます。