エラー防止チェック(変形分類)
以下では、変形分類シーンにおけるワーク認識の設定フローについて説明します。対象物に曲がり、伸び、圧痕などの変形が発生しているかを検出し、外観異常を識別できます。
設定ツール をクリックし、エラー防止チェック を選択します。その後、変形分類 を選択すると、設定フローに進みます。
使用手順
全体の認識フローは、以下の4つの手順で構成されます。

-
画像前処理:入力画像に対して、色空間変換、画像強調、ノイズ除去、モルフォロジー変換などの前処理を行い、画像品質を向上させます。対象物特徴を強調し、背景ノイズを低減することで、後続の対象物認識に対して信頼性の高いデータ基盤を提供します。
-
位置姿勢補正:認識領域を設定し、補正処理によって認識対象をテンプレートへ位置合わせします。認識対象の特徴に応じて適切な補正方式を選択し、パラメータを柔軟に設定することで、位置および角度のずれを補正し、認識精度と結果の信頼性を向上させます。
-
エラー防止チェック:実際の要件に応じて、位置合わせ後の画像内に検査用目標領域を設定し、良品対象物テンプレートの編集、および認識パラメータと判定ルールの設定を行います。これにより、対象物の変形状態を自動検出・分類できます。
-
共通設定:出力ポートを設定し、判定結果や状態などの関連情報を出力することで、生産ラインにおける自動検査要件に対応します。
画像前処理
対象物認識前に、入力画像の品質に応じて、色空間変換 または 画像前処理 を有効化し、対応するパラメータを調整できます。これにより画像特徴をより明確にし、認識精度および処理効率を向上できます。
画像の色空間を変換
色空間変換では、入力画像をある色空間から別の色空間へ変換できます。例えば、BGRからグレースケール画像への変換や、BGRからHSVへの変換などが可能です。色空間を変換することで、画像特徴をより強調でき、後続の画像処理を行いやすくなります。
詳細な説明については、画像の色空間を変換 をご参照ください。
位置姿勢補正
画像前処理完了後、位置姿勢補正設定を行います。認識領域および補正パラメータを設定することで、現在画像内の認識対象の位置姿勢をテンプレートと一致するよう補正し、後続認識の精度および信頼性を確保します。
補正設定を追加
位置姿勢補正手順へ入った後、補正パラメータグループを新規作成する必要があります。複数のパラメータグループ作成に対応しており、各パラメータグループごとに認識領域およびパラメータを個別設定でき、互いに影響しません。
追加 をクリックすると、補正パラメータ追加ウィンドウが表示されます。パラメータグループ作成時には、画像特徴に応じて適切な補正方式を選択し、対応するパラメータを設定してください。
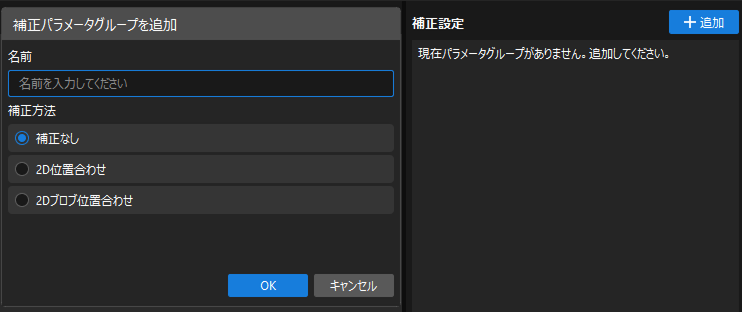
現在、以下の3種類の補正方式に対応しています。
-
補正なし:元の入力画像をそのまま使用して認識を行い、位置姿勢補正処理は実施しません。認識対象の画像内位置が比較的固定されており、補正精度要求が高くないシーンに適しています。
-
2D位置合わせ:並進および回転処理によって、認識対象の位置姿勢をテンプレートに一致させます。認識対象のエッジ輪郭を抽出し、エッジマッチングアルゴリズムによって高精度な補正を実現します。認識対象位置が固定されておらず、明確かつ安定した輪郭特徴を持つシーンに適しています。詳細については、2D位置合わせ をご参照ください。
-
2Dブロブ位置合わせ:画像内の明暗領域(ブロブ)を検出するために使用します。ブロブの幾何学的特徴(面積、質心など)に基づいて目標ブロブを選別し、その最小外接回転長方形を計算します。その後、目標ブロブの質心が画像中心と一致し、最小外接回転長方形の主軸が画像座標軸と一致するよう画像位置姿勢を補正します。詳細については、2Dブロブ位置合わせ をご参照ください。
パラメータグループ作成完了後、パラメータグループ名を右クリック、または右側の機能ボタンをクリックすることで、名前変更、削除、コピー作成などの操作を実行できます。

2D位置合わせ
2D位置合わせは、並進および回転処理によって、入力画像内の認識対象をテンプレートへ位置合わせする補正方式です。認識対象位置のばらつきによる認識誤差を低減し、認識安定性を向上できます。この補正方法を選択した場合は、認識領域設定、テンプレート設定、および認識パラメータ調整を順に実施する必要があります。
認識領域を設定
位置合わせ処理の有効範囲を設定します。領域選択時には、認識対象を完全に含めたうえで、周囲に適切な余白を確保してください。これにより、位置合わせ処理の安定性および後続認識の精度を確保できます。実際の要件に応じて すべてを認識領域として設定 または 認識領域をカスタマイズ を選択できます。認識領域をカスタマイズする場合は、範囲選択ボタンをクリックし、認識領域を手動で指定してください。
-
すべてを認識領域として設定:画像全体を対象に認識を行います。一般的に、認識対象の分布範囲が広いシーンに適しています。
-
認識領域をカスタマイズ:指定した範囲のみを対象に認識を行います。画像内の特定領域のみに注目したい場合や、背景・ロボットハンドなどの干渉領域を除去したい場合に適しています。
ワーク認識
テンプレートを選択
認識領域設定後、テンプレートを選択または編集し、後続の認識対象物の位置決めおよびマッチングに使用します。編集 をクリックすると、2Dテンプレートエディタが開きます。
テンプレート作成時には、画像内から代表性が高く、安定したエッジ特徴を選択してください。これにより、システムは後続処理において、テンプレート特徴と一致するワークを画像内から自動検索し、高精度かつ安定的に位置決めできます。また、マッチング結果の一意性および安定性も確保できます。詳細については、2Dテンプレートエディタ をご参照ください。
| テンプレート編集完了後は、毎回 更新 をクリックして最新設定を適用してください。 |
認識パラメータを設定
テンプレート選択後、ステップを実行 をクリックすると、テンプレートマッチング結果および認識結果を確認できます。
認識結果が期待どおりでない場合は、認識対象の特徴や認識要件に応じて他のパラメータを調整し、認識性能を最適化してください。
パラメータの詳細については、2D位置合わせ をご参照ください。
その後、次へ をクリックしてエラー防止チェックを行います。
2Dブロブ位置合わせ
2Dブロブ位置合わせは、ブロブに基づく補正方式です。画像内のすべてのブロブを検出し、その中から幾何学的特徴が最も顕著なブロブを選別します。その後、目標ブロブの質心が画像中心点と一致し、最小外接回転長方形の主軸が画像座標軸と一致するよう、画像位置姿勢を補正します。2Dブロブ位置合わせを選択した場合は、認識領域設定および認識パラメータ調整を順に実施する必要があります。
認識領域を設定
位置合わせ処理の有効範囲を設定します。領域選択時には、認識対象を完全に含めたうえで、周囲に適切な余白を確保してください。これにより、位置合わせ処理の安定性および後続認識の精度を確保できます。実際の要件に応じてカスタム設定を行えます。
システムは長方形および円形の2種類の範囲選択モードに対応しており、複数領域を組み合わせて追加することも可能です。つまり、同一画像上に複数の長方形または円形認識領域を同時に設定でき、複雑なシーンにおける認識要件にも対応できます。
ワーク認識
認識領域設定完了後、認識対象の特徴や認識要件に応じて各種パラメータを調整し、認識性能を最適化できます。
詳細については、2Dブロブ位置合わせ をご参照ください。
各パラメータの使用方法については、パラメータ調整事例 も参照してください。
エラー防止チェック
画像位置合わせ完了後、変形検出を行います。2Dテンプレートマッチングによって、画像内の対象物の変形状態を判定します。対象物と良品テンプレートの特徴を比較し、設定した変形しきい値に基づいて、対象物に外観上の変形異常が存在するかを自動判定します。
目標領域を設定
まず、検出に使用する有効範囲を設定します。領域選択時には、検出対象物を完全に含め、不要な背景領域を除去してください。実際の要件に応じて すべてを認識領域として設定 または 認識領域をカスタマイズ を選択できます。認識領域をカスタマイズする場合は、範囲選択ボタンをクリックし、認識領域を手動で指定してください。
-
すべてを認識領域として設定:画像全体を対象に認識を行います。一般的に、認識対象の分布範囲が広いシーンに適しています。
-
認識領域をカスタマイズ:指定した範囲のみを対象に認識を行います。画像内の特定領域のみに注目したい場合や、背景・ロボットハンドなどの干渉領域を除去したい場合に適しています。
ワーク検出
テンプレートを選択
目標領域設定完了後、良品を使用してテンプレートを作成する必要があります。これにより、リアルタイムに取得した対象物とテンプレートを比較し、差異を識別できます。テンプレート選択 の右にある 編集 をクリックすると、2Dテンプレートエディタが開きます。
テンプレート作成時には、画像内から代表性が高く、安定したエッジ特徴を選択してください。これにより、システムは後続処理において、テンプレート特徴と一致するワークを画像内から自動検索し、高精度かつ安定的に位置決めできます。また、マッチング結果の一意性および安定性も確保できます。詳細については、2Dテンプレートエディタ をご参照ください。
| テンプレート編集完了後は、毎回 更新 をクリックして最新設定を適用してください。 |
認識パラメータを設定
テンプレート選択後、対象物の特徴や検査要件に応じて各種パラメータを調整し、検出性能を最適化できます。
| パラメータ | 説明 | ||
|---|---|---|---|
エッジ極性感度 |
パラメータ説明:マッチング時にエッジ極性がテンプレートと一致している必要があるかどうかを制御します。極性とは、エッジにおけるグレースケール値の変化方向(明から暗、または暗から明など)を示します。
|
||
最小マッチングスコア |
パラメータ説明:マッチング結果が有効かどうかを判定するために使用します。マッチングスコアがこのパラメータ値未満の結果は破棄されます。
|
||
有効マッチングしきい値 |
パラメータ説明:対象画像内において、勾配振幅がこのしきい値以上の点は有効エッジポイントとみなされ、マッチングスコア統計に使用されます。
|
||
有効マッチング比率下限 |
パラメータ説明:有効マッチングのエッジポイント数が、テンプレートエッジポイン総数に占める最小割合を設定します。
|
||
検索半径 |
パラメータ説明:位置姿勢補正処理中、各テンプレート特徴点に対して対象画像内で対応するマッチ点を検索する際に許可される円形検索領域の半径です。 初期値:8
|
||
重なり合う比率の上限 |
パラメータ説明:重複したマッチング結果をフィルタリングするために使用します。2つのマッチング結果間の重複率がこのパラメータ値を超える場合、マッチングスコアが高い結果のみ保持されます。
|
||
塗りつぶし比率 |
マッチングする対象物が画像境界外にはみ出す可能性がある場合に、許可されるパディングサイズがテンプレートサイズに占める割合を指定します。塗りつぶしを行うことでエッジマッチング成功率を向上できますが、通常は計算量が増加します。
初期値:0% |