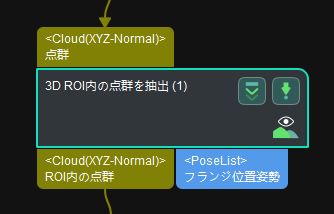
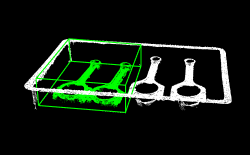
3D ROI内の点群を抽出
パラメータ説明
| パラメータ | 説明 | 説明図 |
|---|---|---|
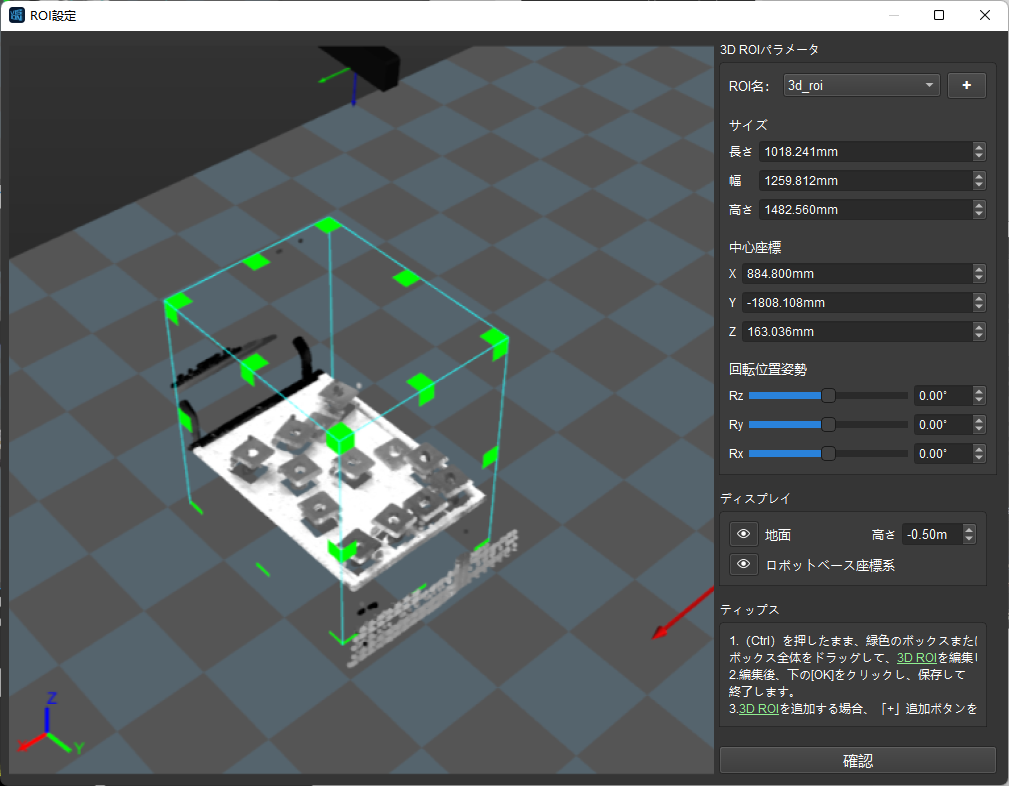
3D ROIファイル |
調整説明:エディタを開く をクリックし、表示される画面で3D ROIを設定します。詳細については、3D ROIを設定 をご参照ください。 |
|
入力点群の座標系タイプ |
初期値:カメラ座標系
|
|
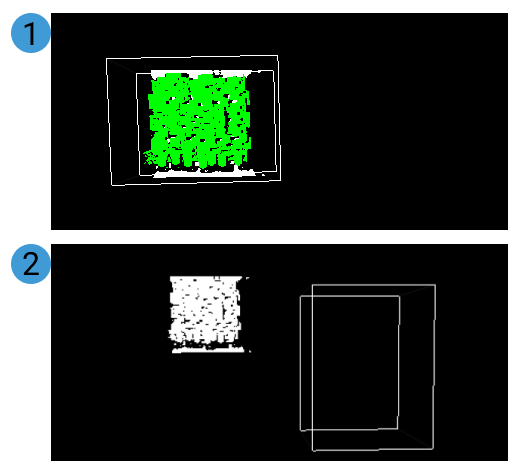
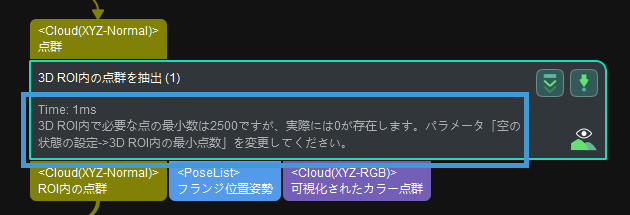
3D ROI内の最小点数 |
初期値:0
|
|
3D ROI内の点が空の状態であるかを送信 |
初期値:チェックを入れる
|
|
| パラメータ | 説明 | 説明図 |
|---|---|---|
3D ROIファイル |
調整説明:エディタを開く をクリックし、表示される画面で3D ROIを設定します。詳細については、3D ROIを設定 をご参照ください。 |
|
入力点群の座標系タイプ |
初期値:カメラ座標系
|
|
3D ROI内の最小点数 |
初期値:0
|
|
3D ROI内の点が空の状態であるかを送信 |
初期値:チェックを入れる
|
|