2D方法による点群エッジを推定
機能
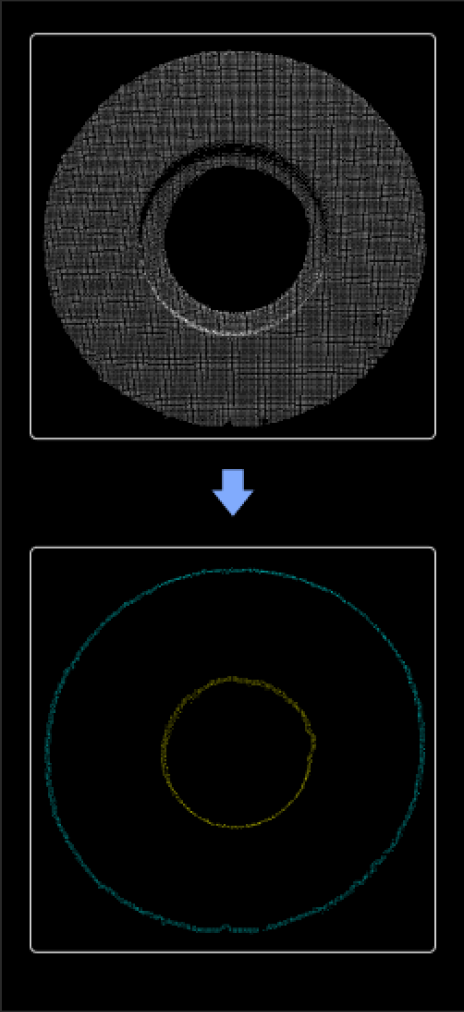
入力点群から点群エッジを抽出します。
|
入力された3D点群を2D画像へ投影し、対応するマスクを生成します。その後、マスク上で輪郭検出およびモルフォロジー処理を行い、検出された2D輪郭を3D点群へ再マッピングすることで、点群エッジを出力します。 |
使用シーン
平面ワークの供給(ピッキング)シーンにおいて、平面ワークの点群エッジを抽出するためによく使用され、通常は3Dマッチング関連ステップと組み合わせて利用されます。 3Dエッジ抽出アルゴリズムと比較して処理速度が速いため、実行時間を短縮したい場合や、3D点群に多くのノイズ・干渉が含まれる場合、またワークの最外層エッジのみを抽出する必要がある場合に使用することを推奨します。
パラメータ説明
輪郭設定
| パラメータ | 説明 |
|---|---|
2D線の幅 |
パラメータ説明:マスク上で輪郭を抽出する際の線幅を設定します。この値が大きいほど生成される2D輪郭は太くなり、3D点群エッジへ変換された際に含まれる点数も増加します。
|
輪郭の検索方法 |
パラメータ説明:輪郭の検索方法を指定します。エッジ抽出に使用される輪郭の範囲および階層構造を決定し、生成されるエッジ点群の完全性や輪郭構造に影響します。 オプション:CV_RETR_EXTERNAL、CV_RETR_LIST、CV_RETR_CCOMP、CV_RETR_TREE
初期値:CV_RETR_EXTERNAL |
最小長さ |
パラメータ説明:マスク内で有効な輪郭と見なす最小ピクセル数を設定します。この値を超える点数を持つ輪郭のみ保持されます。
|
同じ点群内の輪郭をマージ |
パラメータ説明:同一の点群に属する複数の輪郭を1つの輪郭としてマージするかどうかを設定します。マージするとエッジ構造を簡略化できます。マージしない場合は、すべての独立した輪郭が保持されます。
|
カスタムの輪郭層 |
パラメータ説明:抽出対象の輪郭階層を指定します。輪郭の検索方法にCV_RETR_TREEを選択した場合に設定が必要です。階層構造は外側から内側へ向かって増加します。最外層は 1 です。また、0 はすべての階層の輪郭、-1 は最内層を表します。
|