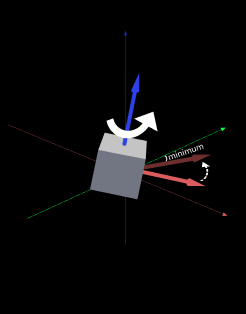
指定軸が基準方向と最小角度になるように位置姿勢を調整
使用シーン
通常、位置姿勢の方向の調整が必要な各種のシーンに適用されます。
このステップは古いバージョンであり、更に機能が揃っている新しいバージョンのステップ 位置姿勢を目標方向に回転(制限なし) を使用し、ステップ 3Dベクトルをクイック作成 と組み合わせて使用してください。
パラメータ説明
可視化設定
| パラメータ | 説明 |
|---|---|
位置姿勢表示の設定 |
パラメータ説明:このパラメータは、位置姿勢の表示タイプを設定するために使用されます。 オプション:
初期値:出力位置姿勢のみを表示。 |
| パラメータ | 説明 |
|---|---|
基準点を使用 |
パラメータ説明:このパラメータは、方向の計算に基準点を使用するかどうかを選択するために使用されます。チェックを入れた後、基準点の設定 パラメータ群を設定する必要があります。
|
基準点を使用
| パラメータ | 説明 |
|---|---|
相対Z値を使用 |
パラメータ説明:このパラメータは、基準点のZ軸を置き換えるかどうかを選択するために使用されます。基準点のZ値=元の位置姿勢のZ値+相対値。
|
X |
パラメータ説明:このパラメータは基準点のX値の座標を表します。
|
Y |
パラメータ説明:このパラメータは基準点のY値の座標を表します。
|
Z |
パラメータ説明:このパラメータは基準点のZ値の座標を表します。
|
相対Z値 |
パラメータ説明:このパラメータは、Z方向における並進ベクトルを表します。相対Z値を使用 にチェックを入れた場合に調整する必要があります。
|