STEPファイルをインポートして点群モデルを生成し、軌跡を設定
この設定フローでは、STEPファイルをインポートして点群モデルをすばやく生成し、ワークを作成します。
ワークライブラリのホームページで STEPファイルをインポート の下にある 選択 ボタンをクリックし、ワーク名とSTEPファイルのパスを設定すると、設定フローの詳細が表示されます。主な設定フローは下図に示します。
|
STEPファイルが大きすぎる場合やモデルの特徴が複雑な場合、インポートに時間がかかることがあります。事前に CAD ソフトで不要な特徴を削除し、ファイルサイズを 100MB 以下に抑えることを推奨します。 |

-
STLファイルを設定:インポートされた STEP ファイルは STL ファイルに変換されます。STLファイルの寸法単位や点群生成方法などを設定し、点群モデルの生成に使用します。
-
モデルを編集:生成された点群モデルを編集し、ワーク中心点の補正や点群モデルの設定などを行い、後続の3Dマッチングをより良く行えるようにします。
-
軌跡を設定:編集済みの点群モデル上で軌跡を作成し、必要に応じて調整します。
-
衝突モデルを設定(オプション):衝突モデルを生成し、軌跡計画時の衝突検出に使用します。
以下は、設定フローの詳細な説明です。
STLファイルを設定
インポートされたSTEPファイルはまずSTLファイルに変換されます。その後、STLファイルに対して関連設定を行い、点群モデルの生成に使用します。
STEPファイルを選択(オプション)
誤ったSTEPファイルを選択した場合や、インポート後にモデルの法線ベクトルが異常である場合は、ファイルを選択 をクリックして、STEPファイルを再インポートしてください。
|
STLモデルの法線ベクトルの確認および修正方法については、STLモデルを修正 をご参照ください。 |
エッジ点群の取得方式を選択
ツールは2種類のエッジ点群取得方式を提供しています。実際のニーズに応じて、点群を自動生成 または エッジ点群を選択 を選択する必要があります。
-
点群を自動生成
この方法を選択すると、ツールはサーフェス点群とすべてのエッジ点群を自動で生成します。設定効率が高いですが、後続のマッチングにあまり意味のないエッジ点群が生成され、マッチング効率に影響を与える可能性があります。
-
エッジ点群を選択
この方法を選択すると、ツールはサーフェス点群を自動生成し、エッジ点群は手動で選択して生成します。無意味なエッジや干渉のあるエッジを除去でき、マッチング精度と安定性を向上させることができます。
手動でエッジ点群を選択する操作手順は以下の通りです。
-
選択を開始 をクリックして、エッジ点群選択画面に入ります。
-
ワークのエッジ部分で左クリックしてエッジを選択します。
複数の連続するエッジを自動で連結して選択したい場合は、「エッジ選択時に自動連結」機能を有効にします。
-
保存して適用 をクリックし、選択結果を保存します。
-
点群生成方法を選択
下表を参照して、実際の状況に応じて適切な点群生成方法を選択してください。
| 点群生成方法 | 説明 | 効果 |
|---|---|---|
全体サーフェスから生成 |
STLモデルのすべてのサーフェス情報を基に点群を生成します。
|
|
指定された視点から生成 |
ユーザーが選択した1つまたは複数の視点から、それぞれ点群を生成し合成します。
|
|
|
一部のシーンでは、生成された完全なサーフェス点群を用いた点群モデルマッチングの方が、より良い結果を得られる場合があります。指定した視点に基づいて生成された点群でマッチングの精度が低い場合は、完全なサーフェス点群を用いたマッチングを試してみることを推奨します。 |
ダウンサンプリング方法を設定
点群モデルを生成する前にダウンサンプリングを行い、点群の分布を均一にし、点の数を適切に調整することで、マッチング速度への影響を抑える必要があります。通常は 自動ダウンサンプリング を推奨します。
ダウンサンプリング結果が要件を満たさない場合は、カスタムダウンサンプリング を選択し、実際の状況に応じて サンプリング間隔 を設定できます。サンプリング間隔 が大きいほど、ダウンサンプリング後の点群は疎になります。サンプリング間隔 が小さいほど、ダウンサンプリング後の点群は密になります。
|
サイズの大きいワーク(エアコン筐体など)の場合は、自動ダウンサンプリング によって一部特徴点群が失われる可能性があるため、カスタムダウンサンプリングの使用を推奨します。 |
これでSTLファイルの設定が完了しました。次へ をクリックし、生成された点群モデルを編集します。
モデルを編集
点群モデルを生成した後、3Dマッチングの精度を高めるために、点群モデルを編集する必要があります。
|
STLモデルを点群に変換する際に誤差が生じることがあり、その結果、点群モデルがSTLモデルと完全に一致しない場合があります。 |
点群を編集
干渉点群を除去
点群モデルの周囲に不要な点群が含まれている場合は、点群を編集することでそれらを除去できます。具体的な操作については、点群を編集 をご参照ください。
特徴点群を選択
-
エッジ点群モデルを作成する場合:
実際のアプリケーションでは、ワークは通常複数の配置姿勢を持つため、ワークのエッジ特徴を反映する点群のみを抽出し、点群モデルとして保存します。
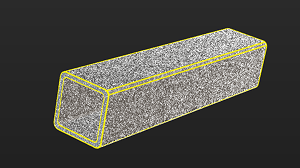
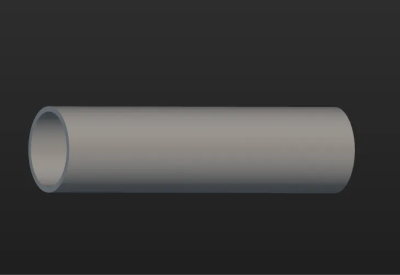
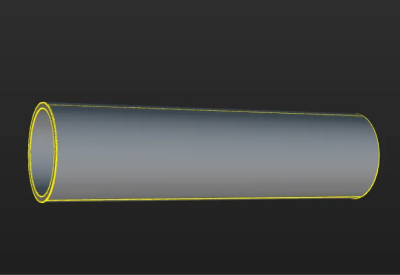
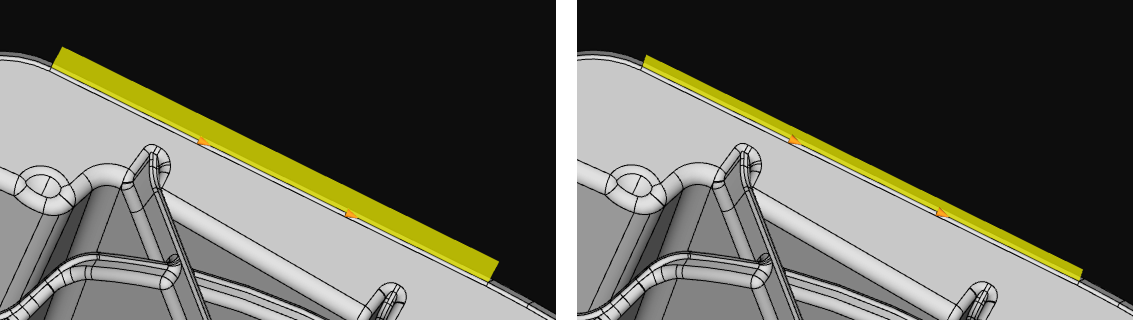
下図は円管のエッジ点群モデルを示します。円管は円柱に似ており対称性があるため、円柱の側面のエッジ点群のみを保持します。また、円管の両端を正確に位置決めできるようにするために、円管の両端のエッジ点群も保持する必要があります。
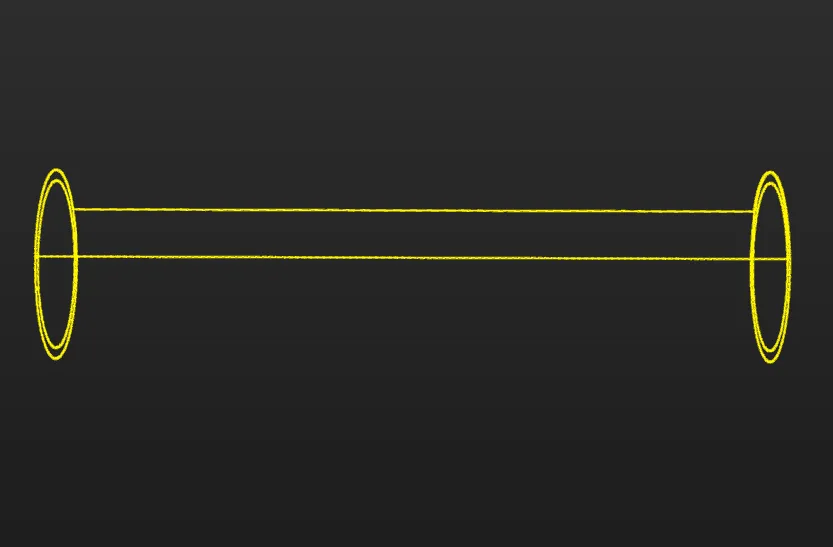
下表は、円管が異なる配置姿勢にある場合の対応するエッジ点群です。
円管の配置姿勢 対応するエッジ点群(黄色で表示) 
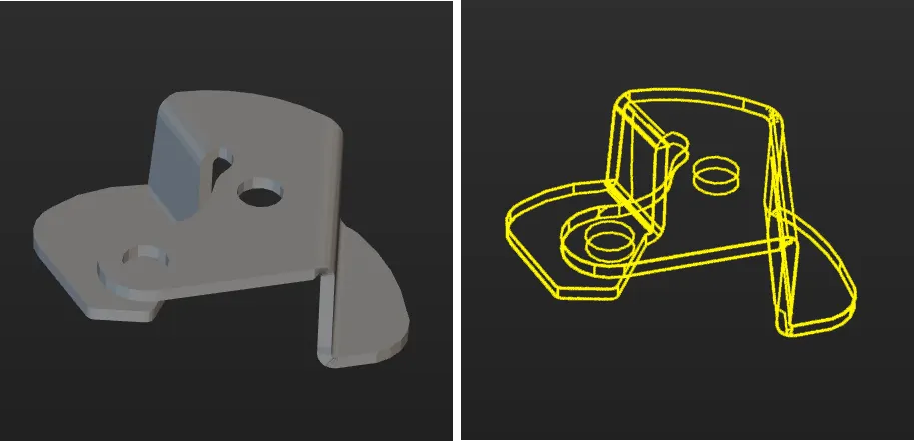
ワーク(例えば板金部品)が対称性を持たない場合、ワークのすべての視点からのエッジ点群を保持する必要があります。
-
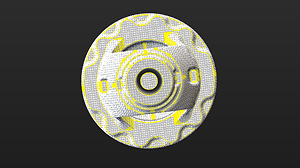
サーフェス点群モデルを作成する場合:
サーフェス点群モデルは、位置姿勢の正確性を検証し、位置姿勢の信頼度を計算する際に重要な役割を果たします。そのため、サーフェス点群モデルを作成する際には、完全なワークのサーフェス点群を使用することを推奨します。これにより、サーフェス点群モデルの有効性が向上します。下図は円管のサーフェス点群モデルを示します。

対象物中心点の補正
このツールは対象物中心点を自動で計算しますが、必要に応じて対補正することも可能です。用途による中心点の補正 の下に計算方法を選択し、計算を開始 をクリックして対象物中心点を補正します。
| 方法 | 説明 | 詳細操作 | 適用シーン |
|---|---|---|---|
元の中心点を使用して再計算 |
デフォルトの計算方法であり、ワークの特徴と元の中心点を基に中心点を再計算します。 |
元の中心点を使用して再計算 を選択し、計算を開始 をクリックします。 |
一般的に、すべてのワークに対してこの方法でワークの中心点を計算できます。 |
対称中心に補正 |
ワークの対称性に基づいて中心点を計算します。
|
対称中心に補正 を選択し、計算を開始 をクリックします。 |
後続でワークの対称性に基づいてマッチング結果をフィルタリングする必要がある場合は、この方法でワークの中心点を計算できます。 |
特徴中心に補正 |
選択した 特徴タイプ と設定した 3D ROI に基づいて中心点を計算します。 |
|
明らかな幾何学的特徴を持つワークに適しています。
|

元の点群にリセット
編集中に現在の点群編集結果が期待通りでない場合は、リセット をクリックすることで、すべての編集操作を取り消し、「モデルを編集」手順へ入った時点の初期状態へ点群を復元できます。
|
点群をリセットした後は、ワーク中心点を再計算し、点群モデル設定を更新する必要があります。 |
点群モデルを設定
より高精度な3Dマッチングを実現するために、ツールでは以下の2種類の点群モデル設定を提供しています。関連設定を行うには、点群モデル設定 機能を有効にしてください。
位置姿勢を計算してマッチング結果をフィルタリング
位置姿勢を計算してマッチング結果をフィルタリング 機能を有効にすると、マッチング中に設定に基づいて複数回の試行が行われ、信頼度の高いマッチング結果が得られます。しかし、試行回数が増えると処理時間が長くなる場合があります。
ここには2つの計算方法があります。それぞれ、マッチングに失敗する可能性のある位置姿勢を自動的に計算 と、対称性を手動で設定 です。一般的には、マッチングに失敗する可能性のある位置姿勢を自動的に計算 を選択することをお勧めします。詳細は下表の通りです。
| 方法 | 説明 | 詳細操作 |
|---|---|---|
マッチングに失敗する可能性のある位置姿勢を自動的に計算 |
誤マッチングの原因となる可能性のある位置姿勢を自動的に計算します。計算の過程では、ワークを Z 軸回転させた際に発生し得る等価または混同しやすい位置姿勢に基づき、候補集合が自動的に生成されます。その後のマッチング処理において、これらの位置姿勢と正常にマッチングした位置姿勢は不合格と見なされ、除去されます。 |
計算結果は点群モデルを変更しても自動的には更新されません。変更があった場合は、再計算を行ってください。 |
対称性を手動で設定 |
手動で設定した 対称回数 や 角度範囲 などのパラメータに基づいて、誤マッチングを引き起こす可能性のある位置姿勢を計算します。その後のマッチング処理において、これらの位置姿勢と正常にマッチングした位置姿勢は不合格と見なされ、除去されます。 |
対称性のタイプ を参照して 対称軸 を選択し、その後、対称回数と角度範囲 を設定します。 |
|
対称性を手動で設定した場合、その設定は 3Dマッチング ステップの低精度マッチング、高精度マッチング、および(有効化されていれば)追加の高精度マッチングのすべての処理で有効となります。 |
|
上記の機能を使用した後、後続のマッチング関連ステップでも対応するパラメータ設定を行う必要があります。詳細は以下の通りです。
|
重み付けモデルを設定
ワーク認識プロセスで重み付けモデルを設定することで、ワークの重要な特徴を強調し、マッチング結果の精度を向上させることができます。通常、重み付けモデルはワークの向きを区別するために使用されます。以下は、重み付けモデルの設定方法です。
|
点群表示設定 が サーフェス点群のみを表示 に設定されている場合にのみ、重き付きモデルを設定できます。 |
-
モデルを編集 をクリックします。
-
可視化表示エリアで、マウスの右ボタンを長押したままワーク上の一部特徴を選択します。選択された領域(重み付けモデル)には、マッチング処理中により高い重みが与えられます。
Shiftキーを押しながら右クリックを長押しすると、同一の点群モデル上に複数の重み付け領域を設定できます。
-
適用 をクリックすると、重み付けモデルの設定が完了します。
|
重み付けモデルを設定した後、それを後続のマッチング処理で有効にするには、「3Dマッチング」ステップの モデル選択 パラメータで作成した重み付けモデルを選択し、位置姿勢フィルタリング パラメータで 重み付けモデルを使用 を有効にする必要があります。「重み付けモデル」パラメータは、パラメータ調整レベルが 上級 の場合に利用可能です。 |
これで点群モデルの編集が完了しました。次へ をクリックし、点群モデルに軌跡を設定します。
軌跡を設定
軌跡を作成
ツールは軌跡作成に 手動作成 と 自動作成 の2つの方法を提供しています。
現在のワーク設定フローでは、自動作成 方式を使用してSTLモデル上に軌跡を作成することを推奨します。
手動で軌跡を作成
「軌跡を設定」手順で 手動作成 をクリックすると、「手動作成」画面に入ります。具体的な操作手順は以下の通りです。
-
軌跡点を選択します。
Shift キーを押しながら、マウスの右クリックでワーク上をクリックすると、軌跡点を選択できます。ツールは軌跡点を自動で接続して軌跡を形成します。

-
軌跡点を調整します。
可視化エリア右側のリストには作成済みの軌跡点が表示されます。軌跡内の軌跡点が要件に合わない場合は、以下の操作で軌跡点を調整できます。
操作 説明 軌跡点の位置と方向を調整
該当の軌跡点を選択し、「軌跡点設定」で関連する数値を調整すると、軌跡点の位置と方向を変更できます。
軌跡点の順序を調整
リスト内で軌跡点をドラッグして順序を変更します。
軌跡点を追加
新規作成 をクリックすると、ツールは最後の軌跡点の後に新しい軌跡点を追加します。
軌跡点の位置合わせ
リスト内で少なくとも3つの軌跡点を選択し、位置合わせ をクリックすると、選択した軌跡点のZ軸は軌跡点にフィットする平面に垂直になり、X軸は次の軌跡点の方向を向きます。
軌跡点を補間
選択した軌跡点が不均一に分布している場合、補間機能で均等に分布させることができます。
2つの軌跡点を選択し、「最大距離」パラメータを設定して 補間 をクリックすると、2点間の距離が設定値を超える場合、ツールが自動で両点の間に軌跡点を追加し、両軌跡点間の既存の軌跡点を置き換えます。 -
軌跡を保存します。
軌跡の作成が完了したら、保存して適用 をクリックして軌跡を保存できます。
自動で軌跡を作成
「軌跡を設定」手順で 自動作成 をクリックすると、「手動作成」画面に入ります。具体的な操作手順は以下の通りです。
-
選択ルールを設定します。
軌跡を選択する際は、まずルールを設定する必要があります。具体的な説明は以下の通りです。
-
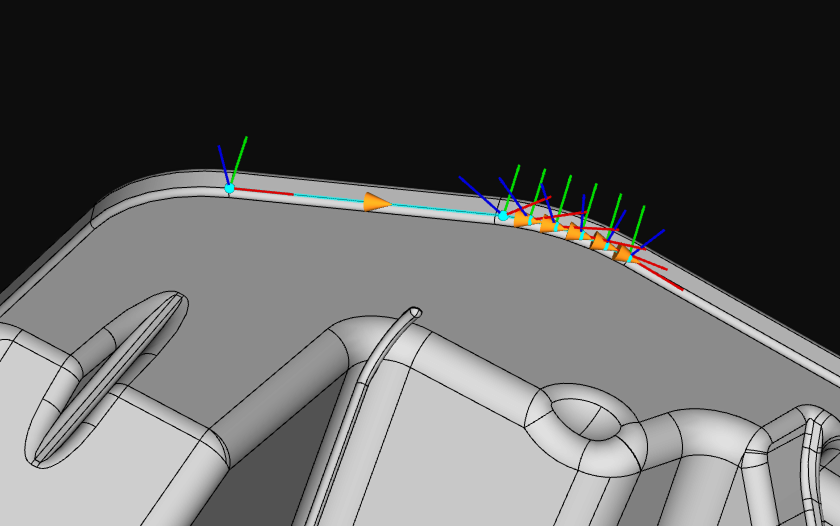
方向設定
パラメータ 説明 説明図 ロボットハンド方向
このパラメータは、ロボットハンド(例:スプレーガン、研磨ヘッド、接着ガンなど)が軌跡に沿って移動する方向を設定するために使用されます。
-
ロボットハンド方向が 垂直 の場合:軌跡点でのロボットハンド方向が、その点のワーク表面の法線ベクトルと一致します。例:接着ガンがワーク表面に垂直に配置される場合(図の左側参照)。
-
ロボットハンド方向が 接線 の場合:軌跡点でのロボットハンド方向が軌跡の接線方向と一致します。例:研磨ヘッドがワーク表面に沿って配置される場合(図の右側参照)。
ロボットハンドの反対方向を生成
このパラメータはロボットハンドの方向を反転させるために使用されます。有効にすると、軌跡を選択する際のロボットハンド方向が反転され、軌跡点のZ軸方向が逆になります。この機能はロボットハンド方向のみを変更し、軌跡点の位置には影響しません。
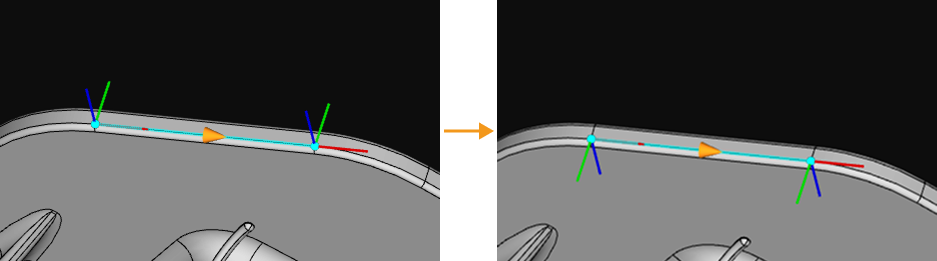
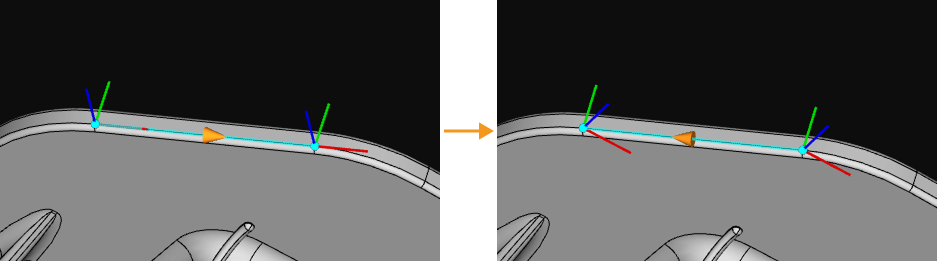
軌跡の反対方向を生成
このパラメータは軌跡の方向を反転させるために使用されます。有効にすると、軌跡を選択する際の軌跡方向が反転され、軌跡点のX軸方向が逆になります。この機能は軌跡方向のみを変更し、軌跡点の位置には影響しません。
-
-
マージ設定
パラメータ 説明 説明図 軌跡選択時に自動連結
この機能を有効にすると、単一の選択操作中に複数の隣接する軌跡を連続で選択でき、自動的に1本の連続した軌跡として結合されます。これにより、繰り返し操作を減らし、効率を向上させることができます。
選択後に軌跡を自動マージ
この機能を有効にすると、現在の軌跡の選択が完了した際に、ツールは現在の軌跡と前の軌跡を自動でマージしようとします。軌跡方向が一致する場合のみ自動マージが行われ、方向が異なる場合は自動マージされません。
軌跡をマージする際にハンドの方向を考慮
このパラメータは軌跡をマージする際の判断条件で、「選択後に軌跡を自動マージ」と併用する必要があります。軌跡を選択する際、軌跡方向が一致するだけでなく、ハンドの方向(法線ベクトル方向)も一致している場合にのみ、軌跡がマージされます。
-
-
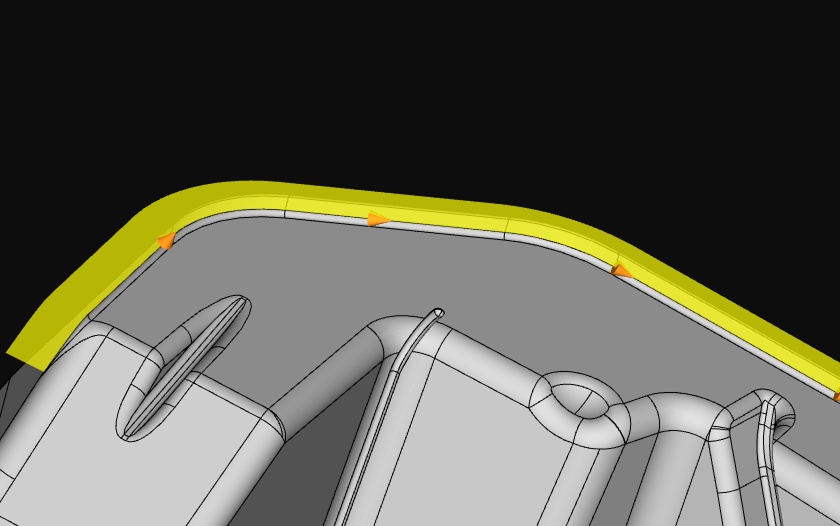
軌跡を選択します。
マウスの左クリックでワーク上をクリックし、軌跡を選択します。
-
軌跡点を調整します。
「選択結果」の下に、既に選択した軌跡が表示されます。必要に応じて、以下のパラメータを調整して軌跡を簡略化できます。軌跡点の数を減らすことで形状を簡略化しつつ、全体の形状をできるだけ維持します。これは、処理時間の短縮やロボットの動作効率向上のために軌跡の複雑さを減らす必要がある場合に適しています。
パラメータ 説明 説明図 最大偏差
軌跡を簡略化する際に許容される最大偏差(H)。偏差が大きいほど軌跡点は減少しますが、形状が歪む可能性があります。
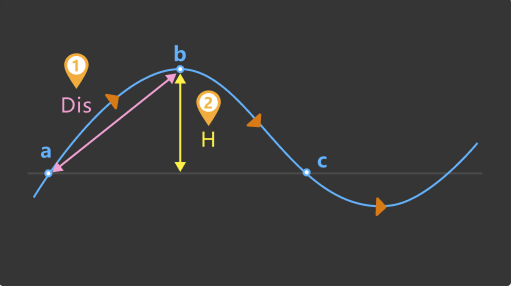
最小保持間隔
元の軌跡で2つの点間の距離(Dis)がこの値より大きい場合、両方の点を保持します。
-
軌跡を保存します。
軌跡の作成が完了したら、保存して適用 をクリックして軌跡を保存できます。
軌跡を調整
軌跡作成後は、必要に応じて軌跡を調整できます。
-
軌跡線を調整
軌跡を作成した後、軌跡をZ軸方向に一定距離オフセットして、実際の作業要求により適合させたい場合は、軌跡線リストで対象の軌跡線を選択し、Z軸方向のオフセット距離 パラメータを設定することで、その軌跡線をZ軸方向に一定距離オフセットできます。
-
個別軌跡点を調整
軌跡リストの特定の軌跡点を選択した後、パラメータ設定エリアで軌跡点に関連する数値を調整すると、その軌跡点の位置や方向を変更できます。
|
軌跡のその他の調整操作については、軌跡を調整 をご参照ください。 |
ロボットハンドをプレビュー
軌跡の作成が完了した後、以下の操作でロボットハンドと軌跡の位置関係をプレビューすることができます。
-
Mech-Vizプロジェクトが現在のソリューションに含まれていることを確認します。
ワークライブラリ内でMech-Vizからロボットハンド情報を取得するためには、Mech-Vizプロジェクトを現在のソリューションにエクスポート する必要があります。
-
ロボットハンドを追加します。
Mech-Vizで ロボットハンドを追加してTCPを設定 します。
-
ロボットハンドをプレビューして有効にします。
ロボットハンドを追加すると、その情報は自動的にワークライブラリのロボットハンドリストに更新されます。実際のニーズに応じて、リストからロボットハンドを選択し、可視化エリアで実際の軌跡作業時の軌跡とハンドの位置関係(下図参照)をプレビューすることができます。または、ロボットハンドにチェックを入れて、実際の軌跡作業に使用することもできます。
Mech-Vizでロボットハンドを変更した場合は、変更を保存した後にワークライブラリのロボットハンドリストを更新する必要があります。また、ワークライブラリ内で軌跡に対応するロボットハンドを有効化することは、Mech-Vizのシミュレーションを正常に実行するための必須条件です。 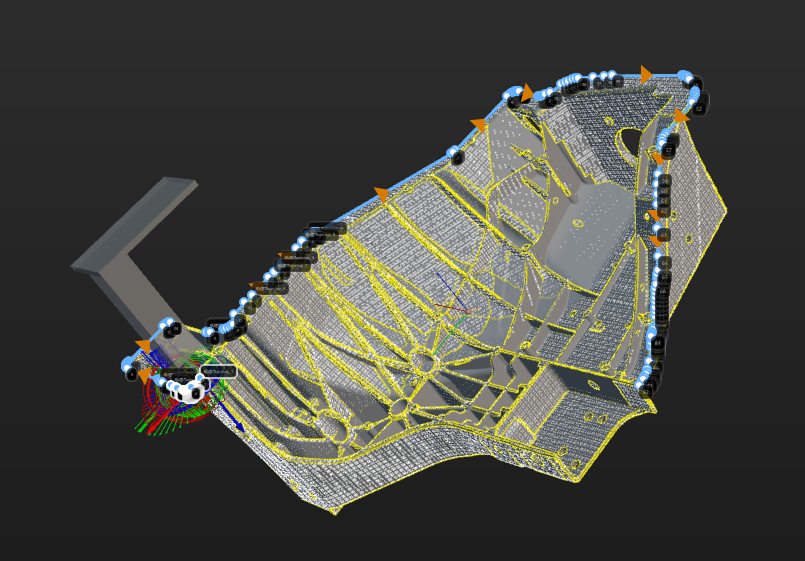
衝突モデルを設定(オプション)
衝突モデルは、経路計画時に対象物が衝突するかどうかを検出するための3Dシミュレーションモデルです。実際の状況に応じて、以下の設定を行うことができます。
衝突モデルを設定
このツールは、使用中のワーク設定フローに基づいて適切な衝突モデルの生成方式を自動的に推奨します。現在推奨されている生成方式は、STLモデルに基づいて点群立方体を生成 です。すでにインポートされたSTLモデルを使用して点群立方体を生成し、その後に衝突検出を行います。生成された衝突モデルは精度が高いですが、衝突検出の速度が遅くなります。
「衝突モデルを表示」を使用すると、生成された衝突モデルの効果をプレビューできます。
把持されているワークの対称性を設定
回転対称とは、ワークをある点を中心に回転させた場合に元の図形に完全に重なり合うことです。経路点の「目標点タイプ」が「対象物位置姿勢」の場合、ワークの対称性を設定することでロボットがワークを保持している際のロボットハンドの回転を減らし、経路計画の成功率が向上し、計画時間が短縮され、ロボットの動作がよりスムーズで迅速になります。
対称性のタイプ を参照して対称軸を選択し、その後、対称回数 と 角度範囲 を設定します。
これで、衝突モデルの設定が完了しました。保存 をクリックすると、ワークが ソリューションフォルダ\resource\workobject_library パスに保存されます。これにより、後続の3Dマッチング関連のステップで使用できるようになります。