3Dコンテナ認識
使用シーン
パレットやコンテナの位置が変化するワーク把持シーンに適しています。通常、前に カメラから画像を取得 ステップを接続し、後段に位置姿勢調整ステップを接続して使用します。
-
シーン1
供給時にコンテナ位置のばらつきは存在するものの、ワーク把持中はコンテナが静止している場合です。この場合、各コンテナの初回供給時に一度だけ認識を行えばよく、繰り返し認識を行う必要がないため、タクトタイムを効果的に向上できます。
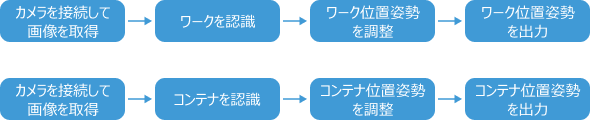
このシーンでは、下図のように、2つの独立したビジョンプロジェクトでそれぞれワーク認識とコンテナ認識を行うことができます。
-
シーン2
ワーク把持中にコンテナが移動する可能性がある場合、またはコンテナ点群がワーク認識に干渉する場合です。この場合、ワーク認識とコンテナ認識を同時に実行し、コンテナ位置姿勢をリアルタイムで更新するとともに、マッチング段階でコンテナ点群によるワークへの干渉を回避することで、ワーク認識の安定性を向上できます。
このシーンでは、下図のように、1つのビジョンプロジェクト内でコンテナ認識とワーク認識を同時に実行できます。

入力と出力
出力
| 出力ポート | データ型 | 説明 |
|---|---|---|
コンテナ位置姿勢 |
Pose[] |
コンテナの位置姿勢。 |
コンテナ名 |
String[] |
コンテナの名前。 |
コンテナ寸法 |
Size3D[] |
コンテナの寸法。 |
コンテナ内部の深度画像 |
Image[] |
コンテナ内部の深度画像。
|
コンテナ内部のカラー画像 |
Image[] |
コンテナ内部のカラー画像。
|
コンテナ内部のサーフェス点群 |
PointCloud/XYZNormal[] |
コンテナ内部のサーフェス点群。
|
コンテナ内部のエッジ点群 |
PointCloud/XYZNormal[] |
コンテナ内部のエッジ点群。
|
パラメータ説明
| パラメータ | 説明 |
|---|---|
ワークを選択 |
パラメータ説明:ドロップダウンリストから認識対象のワークを選択します。ワークは、設定ツールで事前に追加する必要があります。
|
|
「3Dコンテナ認識」ステップで 出力がない場合に制御フローをトリガー にチェックを入れると、ステップに出力がない場合に制御フローがトリガーされます。「出力がある場合に制御フローをトリガー」機能は常に有効です。 |