上級調整レベルのパラメータ説明
以下では、「3Dマッチング」ステップにおける上級調整レベルで設定可能なパラメータ、および各パラメータの役割と調整に関する推奨事項について説明します。
入出力設定
| パラメータ | 説明 |
|---|---|
出力タイプ |
パラメータ説明:このパラメータは、ステップから出力される情報のタイプを選択するために使用されます。 オプション:把持位置姿勢、対象物中心点
初期値:把持位置姿勢 |
入力タイプ |
パラメータ説明:このパラメータは、ステップに入力する点群モデルの指定方法を設定するために使用されます。 オプション:デフォルト、外部モデル
初期値:デフォルト |
点群前処理
| パラメータ | 説明 |
|---|---|
ダウンサンプリングを使用 |
パラメータ説明:有効にすると、点群がダウンサンプリングされます。
|
サンプリング間隔 |
パラメータ説明:このパラメータ値が大きいほど、サンプリングされた点群に含まれる点の数が少なくなり、点群が疎になります。そのため、マッチング精度は低下します。このパラメータ値が小さいほど、実行時間が長くなります。このパラメータは、ダウンサンプリングを使用 が有効な場合に設定する必要があります。
|
フレーム間差分認識を使用
| パラメータ | 説明 |
|---|---|
フレーム間差分認識を使用 |
パラメータ説明:チェックを入れると、前フレームのワーク認識結果を利用し、現在フレームと前フレームで差異のある領域のみを対象として認識を行うことで、認識効率を向上させ、重複計算を削減します。
|
差分判定しきい値 |
パラメータ説明:このパラメータは、隣接フレーム間の領域差分を判定するためのしきい値を設定するために使用されます。差分がこの値を超える場合は当該領域を再認識し、下回る場合は前フレームの認識結果を使用します。
|
オープニング処理カーネルサイズ |
パラメータ説明:差分領域生成時に使用するオープニング処理のカーネルサイズです。カーネルを大きくすると小さなノイズを除去し、接触・連結した領域を分離しやすくなります。小さくするとより多くの細部を保持できます。
|
膨張カーネル比率 |
パラメータ説明:このパラメータは、差分領域を拡張するための比率であり、領域内のワーク点群をできるだけ完全に含め、検出漏れを防ぐために使用されます。値が大きいほど拡張範囲は広くなり処理時間は長くなりますが、値が小さいと差分領域の端部のワークが見落とされる可能性があります。
|
マッチングモード
| 選択したワークの点群モデルに「サーフェス点群」と「エッジ点群」の両方が含まれている場合にのみ、マッチングモード の設定が可能です。点群モデルにいずれか一方のみが含まれている場合、このステップでは対応するマッチングモードが自動的に適用され、手動での切り替えはできません。例えば、点群モデルにエッジ点群のみが含まれている場合、このステップでは自動的にエッジマッチングモードが使用され、マッチングモード に関連するパラメータは表示されません。 |
| パラメータ | 説明 |
|---|---|
マッチングモードを自動的に設定 |
パラメータ説明:有効にすると、ステップでは 低精度マッチングモード と 高精度マッチングモード は自動的に設定されます。
|
低精度マッチングモード/高精度マッチングモード |
パラメータ説明:このパラメータは、マッチングモードを設定するために使用されます。マッチングモードを自動的に設定 を使用しない場合、このパラメータを設定する必要があります。 オプション:サーフェスマッチング、エッジマッチング
初期値:サーフェスマッチング 調整アドバイス:マッチング精度を向上させるために、低精度マッチングモード は エッジマッチング、高精度マッチングモード は サーフェスマッチング に設定することを推奨します。 また、ワークの特徴や取得した点群品質に応じてこのパラメータを調整することも可能です。
|
低精度マッチングの設定
| パラメータ | 説明 |
|---|---|
実行設定 |
パラメータ説明:このパラメータは、マッチングの精度と速度のバランスを設定するために使用されます。精度が高いほど、処理にかかる時間も長くなります。
|
点群モデルの期待点数 |
パラメータ説明:このパラメータは、点群モデル内の期待される点の数を設定するために使用されます。実行モード が カスタム の場合、このパラメータを設定する必要があります。
|
単一点群の出力数を自動的に設定 |
パラメータ説明:有効にすると、単一点群の出力結果数が 出力結果の最大数 の2倍に自動設定されます。
|
単一点群の出力結果数 |
パラメータ説明:このパラメータは、単一点群に対する出力結果の上限を設定するために使用されます。単一点群に複数のマッチング結果がある場合、スコアに基づいて結果が降順にソートされ、上限に従ってスコアが高い結果が出力されます。このパラメータは、単一点群の出力数を自動的に設定 が有効になっていない場合に設定する必要があります。
|
サンプリングされたシーンの点群の最大点数 |
パラメータ説明:サンプリング後のシーン点群の点の数がこの値より多い場合、点群は無視され、空のデータが出力されます。
|
投票設定
| パラメータ | 説明 |
|---|---|
投票パラメータの自動設定 |
パラメータ説明:有効にすると、「投票設定」パラメータ群が自動的に設定されます。
|
単一特徴に含むポイントペアの最大数 |
パラメータ説明:このパラメータは、モデル解析時に各特徴に含まれるポイントペアの最大数を設定するために使用されます。この値が小さいほど処理速度は速くなりますが、精度は低くなります。
|
距離の定量化 |
パラメータ説明:このパラメータは、点と点の間の距離を定量化するために使用されます(2点間の距離=距離の定量化*サンプリング間隔)。この値が大きいほど、マッチング結果の精度が低くなります。
|
角度の定量化 |
パラメータ説明:このパラメータは、ポイントペアにおけるポイントの法線ベクトル同士の角度を定量化するために使用されます(2ベクトル間の角度=360°/角度の定量化)。この値が大きいほど、マッチング結果の精度が高くなりますが、高品質な点群が必要となります。
|
角度分割数 |
パラメータ説明:このパラメータは、低精度マッチング段階において角度量子化を細分化するために使用されます。分割数を大きくするほど角度間隔が小さくなり、角度量子化による位置誤差を低減できます。特に大型ワークに適しています。分割数を増やすと計算時間はわずかに増加します。
|
投票率の下限しきい値 |
パラメータ説明:マッチング処理中、各対象物の位置姿勢にスコア(投票数)が付けられます。位置姿勢スコアが投票での「最高スコア」と「投票率の下限しきい値」の積を超える場合、その位置姿勢は位置姿勢の検証に使用されます。この値が低いほど、正確なマッチング結果が得られる可能性が高くなりますが、実行時間が長くなります。
|
参考点のサンプリングステップサイズ |
パラメータ説明:このパラメータは、シーン点群をダウンサンプリングして、参考点とポイントペアを形成する参考される点を取得するために使用されます。この値が大きいほど、実行速度は速くなりますが、マッチング精度は低下します。
|
参考される点のサンプリングステップサイズ |
パラメータ説明:このパラメータは、シーン点群をダウンサンプリングして、参考される点とポイントペアを形成する参考点を取得するために使用されます。この値が大きいほど、実行速度は速くなりますが、マッチング精度は低下します。
|
位置姿勢検証設定
| パラメータ | 説明 |
|---|---|
ボクセル長さの生成方式 |
パラメータ説明:このパラメータは、ボクセル長生成方式を選択するために使用されます。
|
ボクセル長さ |
パラメータ説明:このパラメータは、ボクセル長さを設定するために使用されます。この値が大きいほど、マッチング結果の精度が低下します。
|
ボクセルの最小長さ |
パラメータ説明:このパラメータは、ボクセルの最小長さを設定するために使用されます。
|
ボクセルの最大長さ |
パラメータ説明:このパラメータは、ボクセルの最大長さを設定するために使用されます。
|
高精度マッチングの設定
| パラメータ | 説明 |
|---|---|
実行設定 |
パラメータ説明:このパラメータは、マッチングの精度と速度のバランスを設定するために使用されます。精度が高いほど、処理にかかる時間も長くなります。
|
サンプリング間隔 |
パラメータ説明:このパラメータ値が大きいほど、サンプリングされた点群に含まれる点の数が少なくなり、点群が疎になります。そのため、マッチング精度は低下します。このパラメータ値が小さいほど、実行時間が長くなります。
|
最大反復回数 |
パラメータ説明:このパラメータ値が大きいほど、マッチング精度が高くなり、処理速度が遅くなります。
|
標準偏差更新のステップサイズ |
パラメータ説明:このパラメータは、標準偏差を微調整するために使用されます。
|
最小標準偏差を使用 |
パラメータ説明:チェックを入れると、最小標準偏差を用いて、繰り返し精度テストシナリオにおける位置姿勢の安定性を向上させます。本機能は該当シーンでのみ使用することを推奨します。実行モード が カスタム の場合、このパラメータを設定する必要があります。
|
偏差補正能力 |
パラメータ説明:このパラメータは、低精度マッチング結果に対する補正能力の大きさを設定するために使用されます。偏差補正能力が大きいほど、実際の対象物の位置姿勢から大きくずれた大まかな位置姿勢を正確な位置姿勢に補正することができます。ただし、偏差補正能力が大きくすると、マッチング精度が低下する可能性がありますのでご注意ください。
|
単一点群の出力数を自動的に設定 |
パラメータ説明:有効にすると、単一点群の出力結果数が 出力結果の最大数 と同じ値に自動設定されます。
|
単一点群の出力結果数 |
パラメータ説明:このパラメータは、単一点群に対する出力結果の上限を設定するために使用されます。単一点群に複数のマッチング結果がある場合、スコアに基づいて結果が降順にソートされ、上限に従ってスコアが高い結果が出力されます。このパラメータは、単一点群の出力数を自動的に設定 が有効になっていない場合に設定する必要があります。
|
追加の高精度マッチング
| ワークの点群モデルにサーフェス点群とエッジ点群の両方が含まれている場合のみ、追加の高精度マッチング が可能です。 |
| パラメータ | 説明 |
|---|---|
有効化 |
パラメータ説明:この機能を有効にすると、異なるモードで高精度マッチングを再度実行します。例えば、現在の高精度マッチングモードがサーフェスマッチングの場合、この機能を有効にすると、エッジモードでも高精度マッチングを再度実行します。これにより、最終的なマッチング精度が向上する可能性がありますが、処理時間がわずかに増加します。
|
実行モード |
パラメータ説明:このパラメータは、追加高精度マッチング処理における精度と速度のバランスを設定するために使用されます。精度が高いほど、処理にかかる時間も長くなります。追加の高精度マッチング が有効な場合に設定する必要があります。
|
偏差補正能力 |
パラメータ説明:このパラメータは、追加高精度マッチングに入力される位置姿勢に対する補正能力の強さを設定するために使用されます。偏差補正能力が大きいほど、実際の対象物の位置姿勢から大きくずれた位置姿勢を正確な位置姿勢に補正することができます。ただし、偏差補正能力が大きくすると、マッチング精度が低下する可能性がありますのでご注意ください。追加の高精度マッチング が有効な場合に設定する必要があります。
|
標準偏差 |
パラメータ説明:このパラメータは、追加高精度マッチングにおける補正範囲を設定するために使用されます。値が大きいほど、補正範囲は広くなり、処理速度は速くなりますが、マッチング精度が低下する可能性があります。値が小さいほど、補正範囲は狭くなり、マッチング精度は高くなりますが、初期位置姿勢に対する要求が高くなります。偏差補正能力 が カスタム の場合、このパラメータを設定する必要があります。
|
低精度マッチングの位置姿勢を調整またはフィルタリング
| パラメータ | 説明 | ||
|---|---|---|---|
位置姿勢距離に基づく非極大値抑制を使用 |
パラメータ説明:有効にすると、候補位置姿勢と選択された位置姿勢との間の距離が対象物の直径の0.1倍未満である場合、候補位置姿勢はフィルタリングで除去されます。
|
||
最大モデル回転角度を自動的に設定 |
パラメータ説明:有効にすると、モデルの最大回転角度 が自動的に設定されます。主に、ワーク表裏と誤ってマッチングした位置姿勢を除去するために使用されます。
|
||
モデルの最大回転角度 |
パラメータ説明:点群モデルがシーン点群にマッチングされる際、モデルのX軸またはY軸周りの回転角度に基づいて位置姿勢をフィルタリングします。モデルの回転角度が モデルの最大回転角度 を超えると、その位置姿勢は除去されます。
|
||
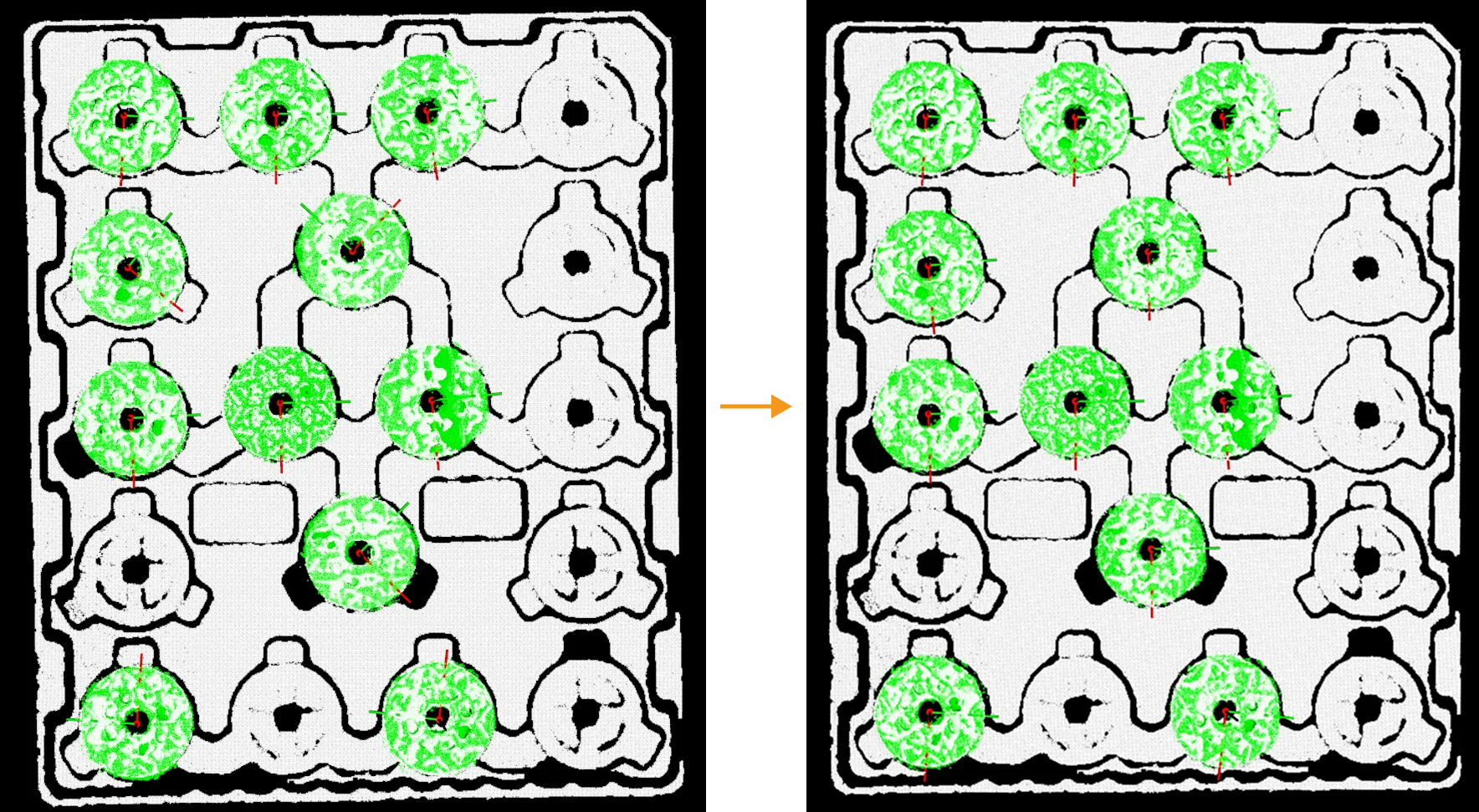
低精度マッチングの方向を調整 |
パラメータ説明:低精度マッチング位置姿勢を調整またはフィルタリングするための戦略を選択します。 オプション:なし、円形ワークの位置姿勢におけるX軸の向きを統一、ワークの対称性に基づいてマッチングを試行 初期値:なし 調整説明:ワークの対称性に基づいてマッチングを試行 パラメータを使用する場合、ワークライブラリの 点群モデル設定 で 点群モデルを設定 を有効にし、位置姿勢を計算してマッチング結果をフィルタリング を選択して関連設定を行います。詳細については、「低精度マッチングの方向を調整」の各オプション説明 をご参照ください。
|
||
X軸の向き |
パラメータ説明:位置姿勢を補正するためのX軸方向を指定します。円形ワークの位置姿勢におけるX軸の向きを統一 を選択する場合、このパラメータを設定する必要があります。 初期値:0.00° |
||
基準角度 |
パラメータ説明:ワークライブラリに保存された対象物中心点の X 軸方向を 0° と定義し、対象物中心点の Z 軸周りに反時計回りへ回転した角度を 基準角度 とします。認識された対象物位置姿勢の X 軸方向が [基準角度 ± 範囲] 内にない場合、その位置姿勢は破棄されます。ワークの対称性に基づいてマッチングを試行 を選択する場合、このパラメータを設定する必要があります。 初期値:0.00° |
||
範囲 |
パラメータ説明:対称性に基づいて位置姿勢をフィルタリングする際の角度許容範囲を設定します。ワークの対称性に基づいてマッチングを試行 を選択する場合、このパラメータを設定する必要があります。 初期値:180.00° |
||
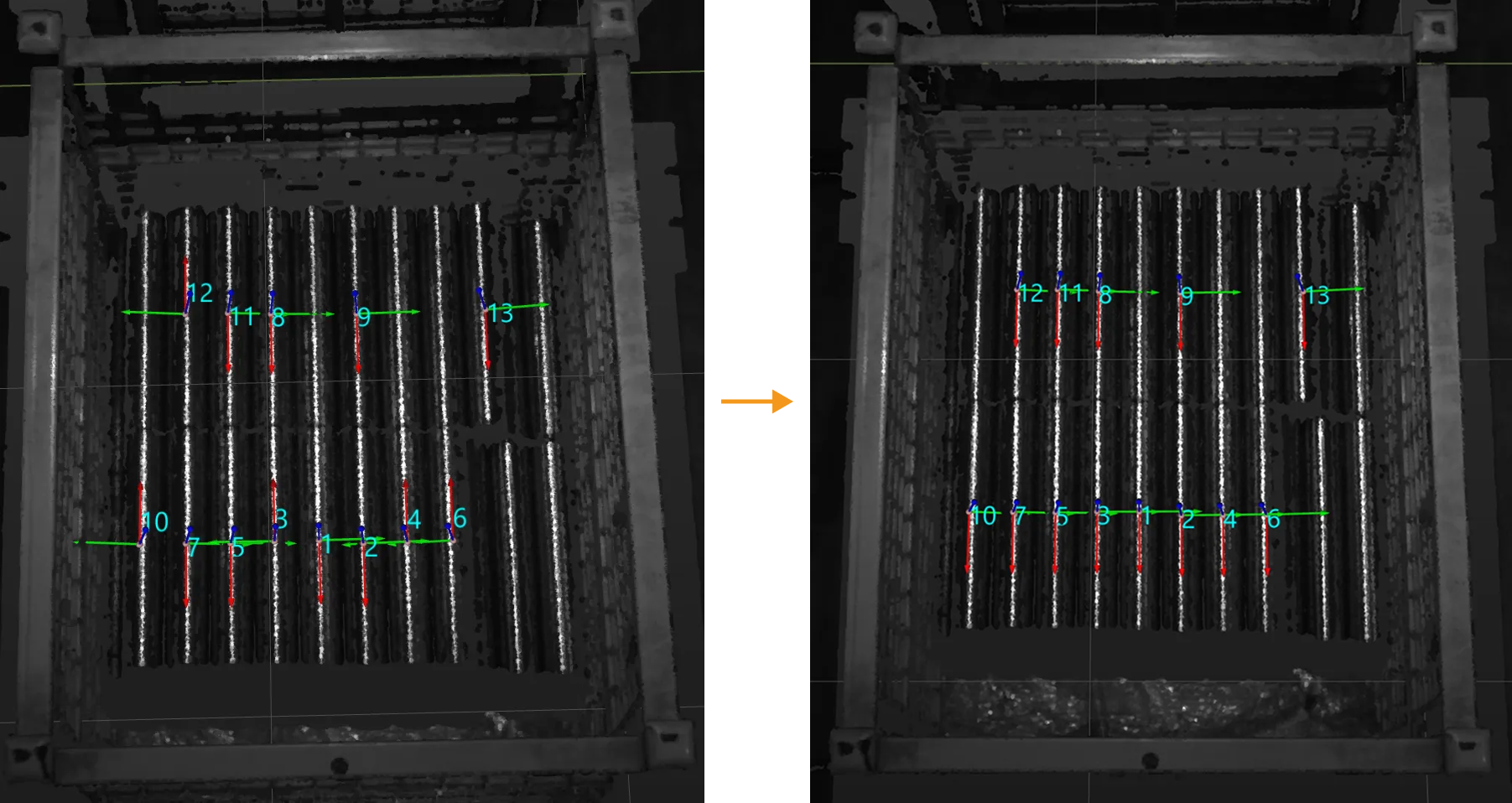
有効化 |
パラメータ説明:細長い対象物をマッチングする際、ワークと点群の位置がワークの長軸方向にずれやすく、両端を正確に合わせることができません。この機能を有効にすると、細長い対象物のマッチング精度を向上させることができます。
|
||
アスペクト比のしきい値 |
パラメータ説明:ワークの長辺と短辺の比率がこのパラメータ値より小さい場合、そのワークは細長い対象物として認識されず、細長い対象物のマッチング精度向上アルゴリズムは適用されません。
|
||
ステップサイズ比 |
パラメータ説明:このパラメータは、マッチング中にワーク点群を平行移動させるステップサイズを指定するために使用されます。ステップサイズ = ワークの長さ × ステップサイズ比。
|
||
ステップ数 |
パラメータ説明:このパラメータは、マッチング時にワークの点群に対して行う平行移動のステップ数を指定するために使用されます。ワークの点群は対象物の長軸の正方向と負方向に平行移動します。そのため、総試行回数は「2 × ステップ数」となります。
|
「低精度マッチングの方向を調整」の各オプションの説明は以下の通りです。
| オプション | 説明 | 調整の例 |
|---|---|---|
なし |
「低精度マッチングの位置姿勢を調整またはフィルタリング」機能を使用しません。 |
|
円形ワークの位置姿勢におけるX軸の向きを統一 |
低精度マッチングによって得られた位置姿勢のZ軸を固定し、X軸を指定方向に回転させます。このパラメータは通常、円形リングやブレーキディスクなどの円対称のワークに適用され、ワークの位置姿勢のX軸を同じ方向に揃えるために使用されます。 |
|
ワークの対称性に基づいてマッチングを試行 |
ワークライブラリ内で計算された誤マッチングの可能性がある結果と、手動設定した対称性情報を利用して補助マッチングを行い、低精度マッチング位置姿勢をフィルタリングします。主に以下の2つのシーンに適用されます。
|
|
信頼度設定
3Dマッチングの処理において、これらのパラメータはマッチング結果の評価および選別に使用され、マッチングの精度と安定性を確保するのに役立ちます。例えば、これらのパラメータを適切に設定することで、最上層に正常に配置されたワークを正確に認識できるようになります。
まず、このステップでは設定された 結果検証レベル に基づいてマッチング結果を評価し、マッチング結果の信頼度を計算します。その後、信頼度と 信頼度しきい値 を比較して、合格と判断されたマッチング結果を選別します。
| マッチング結果の信頼度は、点群モデルとマッチング対象のシーン点群の重なり率です。 |
| パラメータ | 説明 |
|---|---|
結果検証レベル |
パラメータ説明:このパラメータは、マッチング結果の評価の厳しさを設定するために使用されます。
|
検索半径 |
パラメータ説明:このパラメータは、点群モデルとシーン点群の重なり具合を判断するために使用されます。検索半径が小さいほどマッチング結果の信頼度は低くなり、検索半径が大きいほど信頼度は高くなります。結果検証レベル が カスタム の場合、このパラメータを設定する必要があります。
|
サンプリング間隔 |
パラメータ説明:サンプリング間隔を設定し、点群モデルおよびシーン点群に対してダウンサンプリングを行います(評価用にのみ使用されます)。この値が大きいほど、サンプリングされた点群の点数が少なくなります。結果検証レベル が カスタム の場合、このパラメータを設定する必要があります。
|
信頼度しきい値 |
パラメータ説明:マッチング結果の信頼度がこのしきい値より大きい場合、その結果が有効であると見なされます。信頼度が高いほど、マッチング結果はより正確です。
|
サーフェスマッチングに法線ベクトルの偏差を考慮 |
パラメータ説明:サーフェスマッチング結果の検証時に、シーンの点群と点群モデルの対応点の法線ベクトルの角度差を考慮します。このパラメータを有効にすると、出力されるマッチング結果の数は少なくなりますが、マッチング結果の精度が向上します。
|
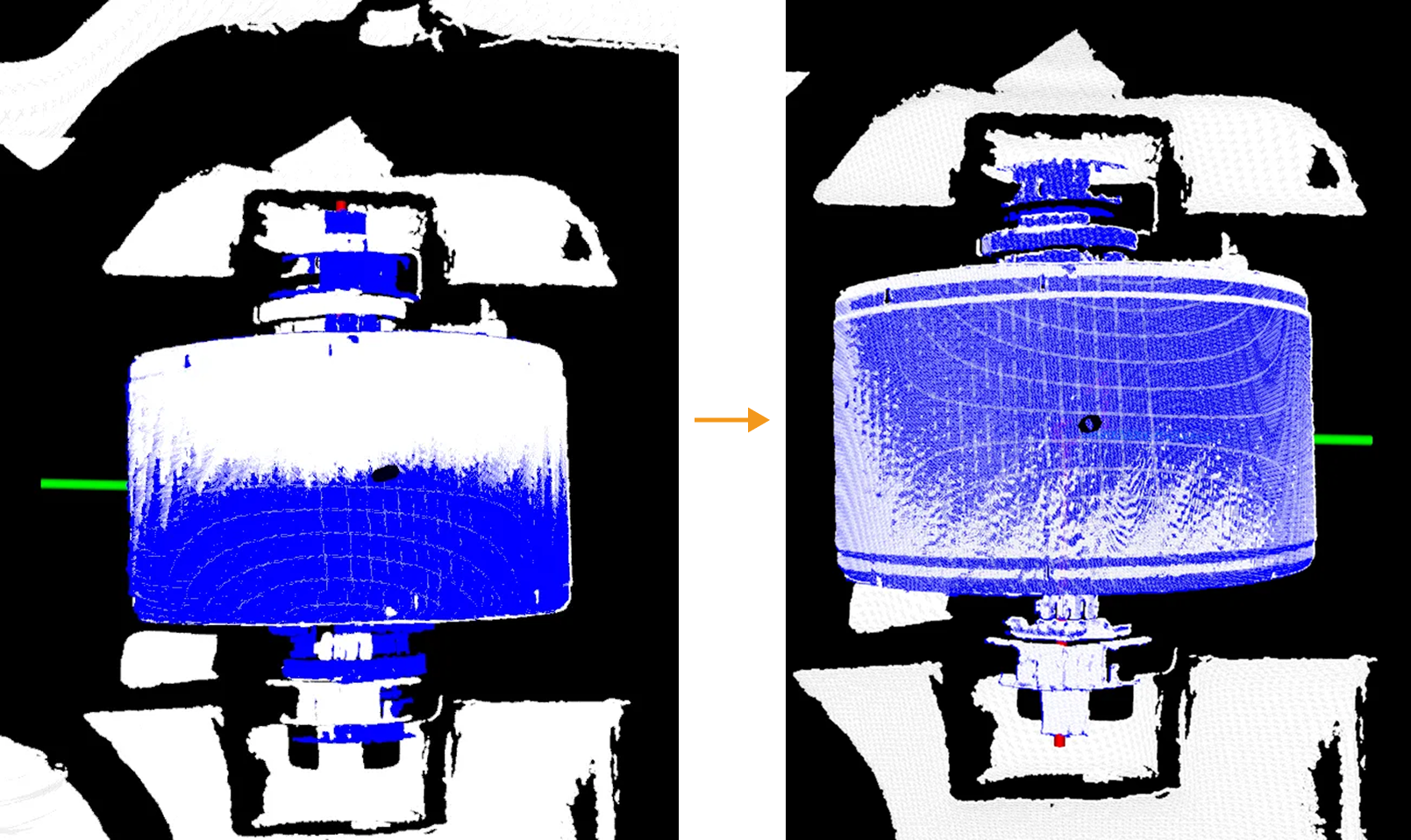
サーフェスマッチングに穴を考慮 |
パラメータ説明:サーフェスマッチング時に、点群モデルとワーク点群の外輪郭が一致している場合でも、ワーク点群やサーフェス点群モデルに穴があると、誤マッチングが発生しやすくなります(例:リングと円盤の誤マッチング)。このパラメータを有効にすると、サーフェス点群モデルとワークが穴部分でマッチングしない場合、対応するサーフェスマッチング信頼度が低くなります。サーフェス点群モデルを編集した場合、編集後のモデルが実際の物体の形状に完全に合っていない場合(例えば、サーフェス点群の中心部分の複雑なパターンを削除した場合)は、この機能を無効にすることを推奨します。
|
信頼度に基づく非極大値抑制の自動設定 |
パラメータ説明:有効にすると、信頼度に基づく非極大値抑制のしきい値 が自動的に設定されます。しきい値が適切に設定されると、誤った重なり位置姿勢が除去されます。
|
信頼度に基づく非極大値抑制のしきい値 |
パラメータ説明:サーフェスマッチングの場合、位置姿勢の信頼度は、認識された対象物を考慮した場合と考慮しない場合で別々に計算されます。認識された対象物を考慮した場合の信頼度と、認識された対象物を考慮しない場合の信頼度の比が、設定されたしきい値より低い場合、対応する位置姿勢はフィルタリングで除去されます。信頼度に基づく非極大値抑制の自動設定 を無効にした場合、このパラメータを設定する必要があります。
|
信頼度の設定方式 |
パラメータ説明:このパラメータは、共同スコアリング戦略の設定方式を選択するために使用されます。 オプション:自動、手動
初期値:自動 |
共同スコアリング戦略 |
パラメータ説明:このパラメータは、結果検証のためのスコアリング戦略を選択するために使用されます。サーフェスとエッジの両方を考慮 を選択すると、信頼度設定 のパラメータ群で、サーフェスマッチングとエッジマッチングのパラメータをそれぞれ設定する必要があります。これにより、マッチング結果をより適切にフィルタリングできます。
|
サーフェスマッチングの結果検証レベル |
パラメータ説明:このパラメータは、サーフェスマッチング結果の評価の厳しさを設定するために使用されます。
|
サーフェスマッチングの検索半径 |
パラメータ説明:このパラメータは、点群モデルとシーン点群の重なり具合を判断するために使用されます。検索半径が小さいほどマッチング結果の信頼度は低くなり、検索半径が大きいほど信頼度は高くなります。サーフェスマッチングの結果検証レベル が カスタム の場合、このパラメータを設定する必要があります。
|
サーフェスマッチングのサンプリング間隔 |
パラメータ説明:サンプリング間隔を設定し、点群モデルおよびシーン点群に対してダウンサンプリングを行います(評価用にのみ使用されます)。この値が大きいほど、サンプリングされた点群の点数が少なくなります。サーフェスマッチングの結果検証レベル が カスタム の場合、このパラメータを設定する必要があります。
|
サーフェスマッチングの信頼度しきい値 |
パラメータ説明:サーフェスマッチング結果の信頼度がこのしきい値より大きい場合、その結果が有効であると見なされます。信頼度が高いほど、マッチング結果はより正確です。
|
エッジマッチングの結果検証レベル |
パラメータ説明:このパラメータは、エッジマッチング結果の評価の厳しさを設定するために使用されます。共同スコアリング戦略 が サーフェスとエッジの両方を考慮 の場合、このパラメータを設定する必要があります。
|
エッジマッチングの信頼度しきい値 |
パラメータ説明:エッジマッチング結果の信頼度がこのしきい値より大きい場合、その結果が有効であると見なされます。信頼度が高いほど、マッチング結果はより正確です。共同スコアリング戦略 が サーフェスとエッジの両方を考慮 の場合、このパラメータを設定する必要があります。
|
モデル処理
| 「隣接点の数」および「角度しきい値」のパラメータは、「3Dマッチング」ステップで、ワークライブラリを通じて「STLモデルをインポート」または「基本幾何立体を作成」フローで作成されたワークを読み込んだ場合にのみ表示されます。 |
| パラメータ | 説明 |
|---|---|
隣接点の数 |
パラメータ説明:法線ベクトルを推定するために使用する隣接点の数を設定します。
|
角度しきい値 |
パラメータ説明:ある点の法線と、その隣接点の法線との間の角度がこの値を超える場合、その点はエッジ点(境界点)として識別されます。
|
重なり合っている結果を除去
| パラメータ | 説明 | ||
|---|---|---|---|
有効化 |
パラメータ説明:このパラメータは、重なり合っている結果の除去機能を有効にするかどうかを選択するために使用されます。 初期値:有効
|
||
重なり合う比率のしきい値 |
パラメータ説明:2つの対象物の点群を正交投影した際のマスクの重なり率がこの値を超えた場合、位置姿勢の信頼度が低い対象物の位置姿勢が除去されます。このパラメータは、重なり合っている結果を除去 機能が有効な場合に設定する必要があります。 初期値:30% |
||
ピクセルサイズの生成方式 |
パラメータ説明:対象物の点群から2D正投影の重なり合う比率を計算する場合、投影後の2D画像上の単位ピクセルの大きさを計算するために、ピクセルサイズの生成方法を選択します。 オプション:自動生成、手動設定
初期値:自動生成 |
||
ピクセルサイズ |
パラメータ説明:対象物点群の2D正投影に基づいて重なり合う比率を計算する際、投影された2D画像上の1ピクセルあたりのサイズを設定します。ピクセルサイズ は、モデル作成時の サンプリング間隔 と同じに設定することを推奨します。この値が大きすぎると、重なり合う比率の計算精度が低くなる可能性があります。この値が小さすぎると、計算される重なり合う比率が小さくなる可能性があります。このパラメータは、ピクセルサイズの生成方式 が 手動設定 の場合に設定する必要があります。
|
重ねられている結果を除去
| パラメータ | 説明 | ||
|---|---|---|---|
有効化 |
パラメータ説明:このパラメータは、重ねられている結果の除去機能を有効にするかどうかを選択するために使用されます。 初期値:有効
|
||
重なり率のしきい値 |
パラメータ説明:このパラメータは、対象物とその他の対象物との重なり率のしきい値を設定するために使用されます。重なり率がこのしきい値を超えると、その対象物は重ねられている対象物と見なされます。重ねられている結果を除去 を有効にする場合、このパラメータを設定する必要があります。
初期値:30% |
||
ピクセルサイズの生成方式 |
パラメータ説明:対象物の点群から2D正投影の重なり率を計算する場合、投影後の2D画像上の単位ピクセルの大きさを計算するために、ピクセルサイズの生成方法を選択します。 オプション:自動生成、手動設定
初期値:自動生成 |
||
ピクセルサイズ |
パラメータ説明:対象物点群の2D正投影に基づいて重なり率を計算する際、投影された2D画像上の1ピクセルあたりのサイズを設定します。「ピクセルサイズ」は、モデル作成時の「サンプリング間隔」と同じに設定することを推奨します。この値が大きすぎると、重なり率の計算精度が低くなります。この値が小さすぎると、計算される重なり率が小さくなる可能性があります。このパラメータは、ピクセルサイズの生成方式 が 手動設定 の場合に設定する必要があります。
|
||
対象物周囲のシーンポイントの除去範囲 |
パラメータ説明:このパラメータ範囲内の対象物周辺のシーン点群は除去されます。残りのシーン点群は重なり検出に使用されます。
|
出力
| パラメータ | 説明 | ||
|---|---|---|---|
出力結果の最大数 |
パラメータ説明:このパラメータは、マッチングに成功した場合の出力されるワークの最大数を指定するために使用されます。この値が大きいほど、ステップの実行時間が長くなります。 初期値:10 調整アドバイス:このパラメータは適切に設定することを推奨します。値を高く設定しすぎないようご注意ください。このパラメータを変更すると、ステップを再実行した後に新しいマッチング結果に基づいて出力結果の数が制限されます。
|
可視化設定
| パラメータ | 説明 |
|---|---|
可視化処理 |
パラメータ説明:「デバッグ結果出力」を有効にすると、選択した可視化項目が「デバッグ結果出力」ウィンドウに表示されます。
|
可視化項目 |
パラメータ説明:このパラメータは、可視化画面に表示する結果項目を選択するために使用されます。選択可能な項目は、可視化処理 の設定によって異なります。
|
点群表示設定 |
パラメータ説明:可視化情報に表示する点群タイプを選択します。「自動」を選択すると、表示タイプが自動的に設定されます。
|
位置姿勢を表示 |
パラメータ説明:有効にすると、位置姿勢は可視化表示エリアに表示されます。
|
位置姿勢タイプ |
パラメータ説明:このパラメータは、可視化表示エリアに表示される位置姿勢のタイプを選択するために使用されます。自動を選択すると、位置姿勢タイプは設定された出力タイプと同じになります。
|