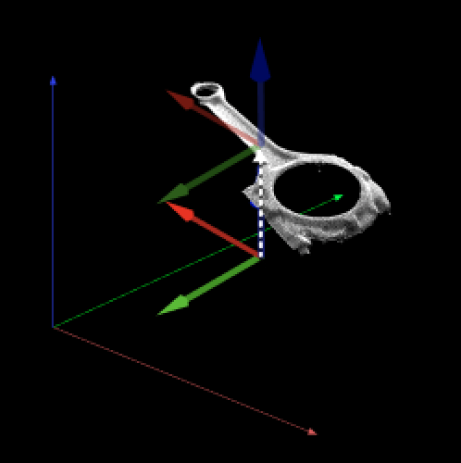
位置姿勢をZ軸に沿って点群表面に移動
使用シーン
通常、物体表面上にない位置姿勢を調整するために使用されます。このような位置姿勢は、対象物の傾き、表面のくぼみや突起などによって発生します。通常、平面点群の位置姿勢とサイズを計算 ステップの後に使用します。
パラメータ説明
可視化設定
| パラメータ | 説明 | ||||
|---|---|---|---|---|---|
選択された座標系で点群を表示 |
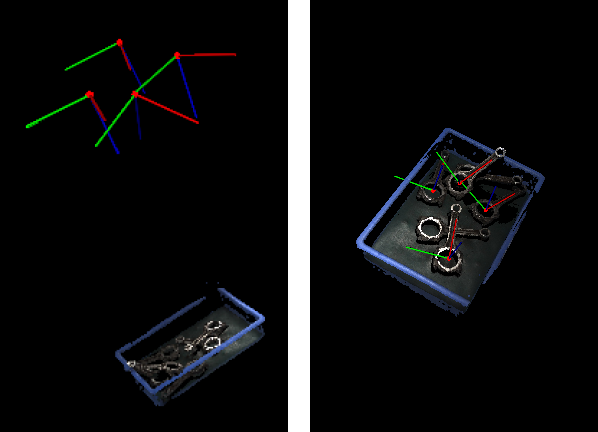
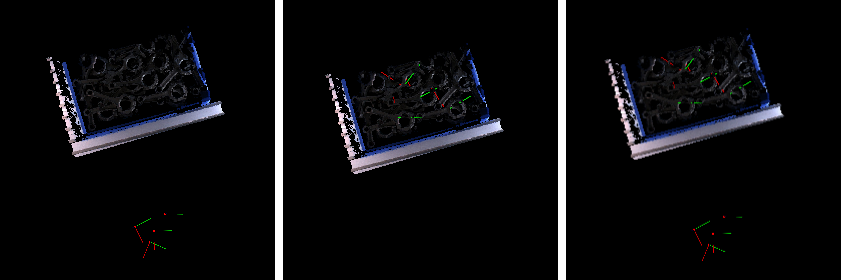
パラメータ説明:ロボット座標系またはカメラ座標系で点群を表示します。 初期値:ロボット座標系 オプション:ロボット座標系、カメラ座標系 調整説明:カメラ座標系 を選択する場合、デバッグ結果出力のウィンドウにカメラ座標系での可視化出力結果が表示されます。ロボット座標系 を選択する場合、デバッグ結果出力のウィンドウにロボット座標系での可視化出力結果が表示されます。調整効果を 調整の例 に示します。
|
||||
位置姿勢表示の設定 |
パラメータ説明:このパラメータは、位置姿勢の表示形式を設定するために使用されます。
|
点群取得の設定
| パラメータ | 説明 |
|---|---|
XOY平面の半径 |
パラメータ説明:XOY 平面上で、位置姿勢の原点から検索範囲の境界までの距離を設定します。単位はミリメートル(mm)です。
|
調整設定
| パラメータ | 説明 |
|---|---|
調整設定 |
パラメータ説明:位置姿勢を Z 軸方向に移動する際に使用するアルゴリズムまたはソートモードを設定します。 オプション:
調整説明:調整設定の違いにより、「基準Z軸」および「選択された Z 値」パラメータで使用可能なオプションが変わります。 |
基準Z軸 |
パラメータ説明: 距離計算時に基準とする座標系を選択します。 オプション:
調整説明:このパラメータは「調整設定」を有効にした場合のみ使用できます。基準座標系を変更すると、位置姿勢と点群の距離計算結果に影響します。 |