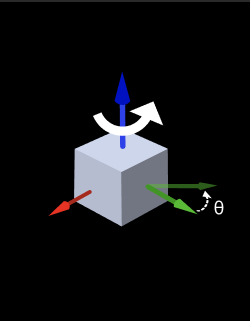
指定された軸を中心に位置姿勢を回転
使用シーン
汎用の位置姿勢調整ステップです。特定使用シーンはありません。
このステップは古いバージョンであり、新しいバージョンの 指定した軸と角度を中心に位置姿勢を回転 を使用して 3Dベクトルをクイック作成 ステップと併用してください。
パラメータ説明
可視化設定
| パラメータ | 説明
|
|---|---|
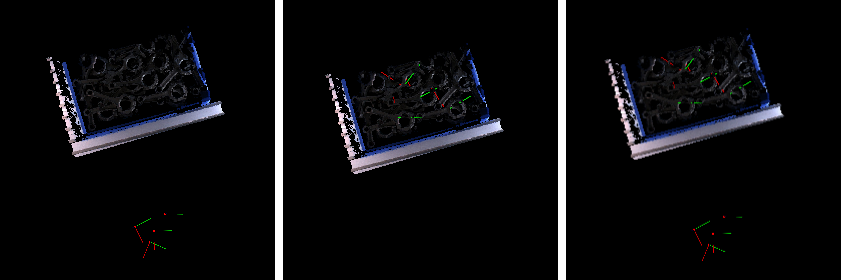
位置姿勢表示の設定 |
パラメータ説明:このパラメータは、位置姿勢の表示形式を設定するために使用されます。
|
汎用の位置姿勢調整ステップです。特定使用シーンはありません。
このステップは古いバージョンであり、新しいバージョンの 指定した軸と角度を中心に位置姿勢を回転 を使用して 3Dベクトルをクイック作成 ステップと併用してください。
| パラメータ | 説明
|
|---|---|
位置姿勢表示の設定 |
パラメータ説明:このパラメータは、位置姿勢の表示形式を設定するために使用されます。
|