定義済みのソート方法による位置姿勢をソート
以下では、定義済みのソート方法で位置姿勢をソートする方法について説明します。
7つのソート方法に対応し、ドロップダウンバーから選択できます。
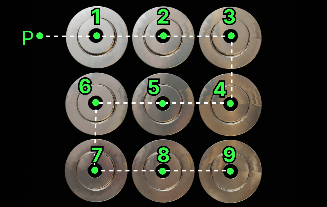
平面上のS形状でソート
使用方法
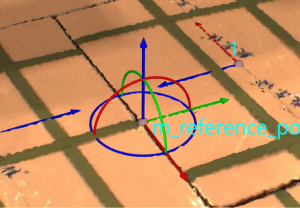
基準位置姿勢
基準位置姿勢は、 マニピュレータによる設定 と 外部ステップによる入力 の2つ方法で設定可能です。詳細は下表の通りです。
番号 |
基準位置姿勢の設定方法 |
説明 |
方法 |
サンプル図 |
1 |
マニピュレータによる設定 |
マニピュレータの位置姿勢を設定することで基準位置姿勢を設定します。 |
|
|
2 |
外部ステップによる入力 |
その他のステップから基準位置姿勢を入力します。 |
|
|
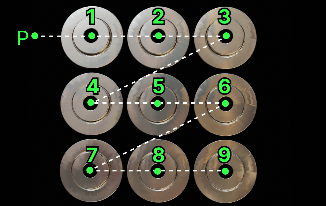
平面上のZ形状でソート
使用方法
基準位置姿勢
基準位置姿勢は、 マニピュレータによる設定 と 外部ステップによる入力 の2つ方法で設定可能です。詳細は下表の通りです。
番号 |
基準位置姿勢の設定方法 |
説明 |
方法 |
サンプル図 |
1 |
マニピュレータによる設定 |
マニピュレータの位置姿勢を設定することで基準位置姿勢を設定します。 |
|
|
2 |
外部ステップによる入力 |
その他のステップから基準位置姿勢を入力します。 |
|
|
位置姿勢から基準位置姿勢までの距離でソート
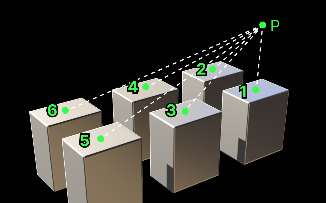
使用方法
基準位置姿勢
基準位置姿勢は、 マニピュレータによる設定 と 外部ステップによる入力 の2つ方法で設定可能です。詳細は下表の通りです。
番号 |
基準位置姿勢の設定方法 |
説明 |
方法 |
サンプル図 |
1 |
マニピュレータによる設定 |
マニピュレータの位置姿勢を設定することで基準位置姿勢を設定します。 |
|
|
2 |
外部ステップによる入力 |
その他のステップから基準位置姿勢を入力します。 |
|
|
位置姿勢から基準位置姿勢のXOY平面までの投影距離でソート
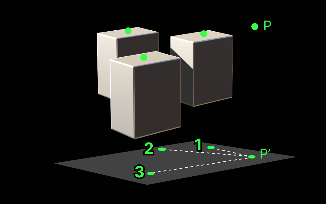
使用方法
基準位置姿勢
基準位置姿勢は、 マニピュレータによる設定 と 外部ステップによる入力 の2つ方法で設定可能です。詳細は下表の通りです。
番号 |
基準位置姿勢の設定方法 |
説明 |
方法 |
サンプル図 |
1 |
マニピュレータによる設定 |
マニピュレータの位置姿勢を設定することで基準位置姿勢を設定します。 |
|
|
2 |
外部ステップによる入力 |
その他のステップから基準位置姿勢を入力します。 |
|
|
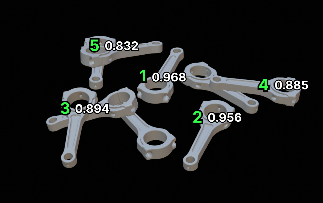
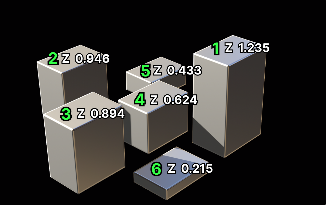
二次元でソート
機能
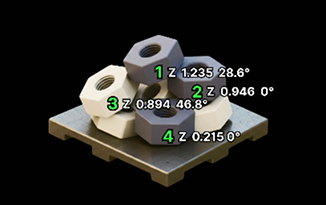
このソート方式では、2つの次元情報に基づいて位置姿勢をソートできます。まず次元1に基づいて位置姿勢をソートおよび層分けし、その後、各層内で次元2に基づいてソートします。昇順・降順の設定も可能です。ソート次元には、ワーク高さや角度など、任意の数値型データを使用できます。
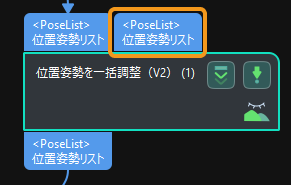
二次元ソート方式を選択すると、「位置姿勢を一括調整(V2)」ステップに以下の2つの入力ポートが追加されます。
-
次元1:このポートに入力された数値は、次元1のソートに使用されます。
-
次元2:このポートに入力された数値は、次元2のソートに使用されます。
他の数値出力関連ステップを「位置姿勢を一括調整(V2)」ステップの新規入力ポートへ接続し、データを取得 をクリックして入力されたソートデータを取得してください。