把持シミュレーションツール
本節では、把持シミュレーションツールとその使用方法について説明します。
機能
把持シミュレーションツールは、Mech-Viz に内蔵されたシミュレーションツールであり、仮想環境でロボットの把持計画を検証するために使用されます。主に仮想シーンの生成と把持検証の2つの機能を備えています。
このツールは、容器、対象物、カメラを含むシミュレーションシーンを構築し、ワークの認識から把持までの一連のフローを模擬することが可能です。ロボットによるワーク把持の到達可能性、把持安定性、切り取り率、衝突防止効果を検証し、潜在リスクを事前に発見することで、把持計画の最適化を支援します。
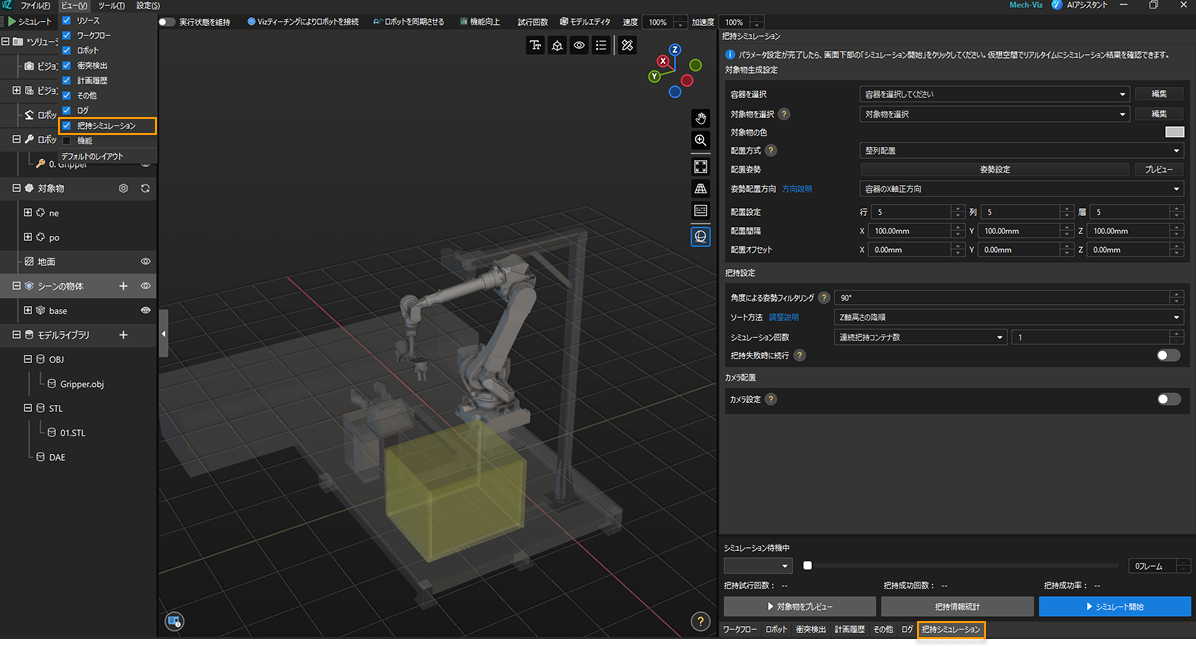
| Mech-Viz を起動すると、機能パネルはデフォルトで「把持シミュレーション」画面を表示します。表示されていない場合は、上部メニューバーのビューをクリックし、把持シミュレーションにチェックを入れてください。 |
使用手順
ツールの使用手順は以下の通りです。

-
レイアウトシミュレーション:仮想環境内で把持に必要なワークのレイアウトシーンを生成します。容器、ワーク数量、ワークの配置方法・姿勢などを柔軟に設定することで、シミュレーションシーンを実際の生産現場の状況に近づけ、多様なワークレイアウトのニーズに対応できます。
-
把持設定:生成されたワークシーンに基づき、把持戦略を構成し、把持のフィルタ条件やソーティングルールを適切に設定することで、ロボットの把持成功率と安定性を向上させます。さらに、把持に失敗したワークを柔軟に処理し、全体の把持フローを最適化できます。
-
カメラ配置(オプション):シミュレーションシーン内に実機のカメラモデルを配置することで、カメラの視野(FOV)が現場の作業範囲をカバーできかの確認や、カメラ自体の衝突検出を行うことができます。また、シミュレーション中にカメラが取得したた画像データを保存し、後続のビジョン認識プロセスのデバッグに活用することも可能です。
-
シミュレーション検証: 現在のシーンと戦略設定に基づいて把持シミュレーションを実行し、把持プロセスに対する統計と結果分析を行い、計画における潜在的な問題を発見・最適化します。