3D位置姿勢高精度推定
使用シーン
このステップは 3D位置姿勢低精度推定(V2) に出力された大まかな候補位置姿勢に基づいて実行し、さらに精確なマッチングをし、さらに正確な位置姿勢を出力します(把持位置姿勢として使用可能)。
入力と出力
パラメータ説明
| パラメータ | 説明 |
|---|---|
パラメータ調整レベル |
パラメータ説明:このパラメータは、ステップパラメータの調整レベルを選択するために使用されます。
|
基本設定
ここで、基本設定(Basic)モードで調整可能なパラメータについて説明します。これらのパラメータは 詳細設定 でも調整できます。
マッチングモード設定
| パラメータ | 説明 | ||
|---|---|---|---|
マッチングモード |
パラメータ説明:このパラメータは、エッジマッチングとサーフェスマッチングのどちらを使用するかを選択するために使用されます。 オプション:サーフェスマッチング、エッジマッチング 初期値:サーフェスマッチング 調整アドバイス:対象物の表面に明らかな認識可能な特徴がある場合(クランクシャフト、ローター、鉄筋など)、サーフェスマッチングを推奨しています。対象物の表面の特徴を反映した点群モデルを作成する必要があります。対象物が平らで、カメラの視野に明確な固定エッジの特徴がある場合(パネル、トラックリンク、コネクティングロッド、ブレーキディスクなど)、エッジマッチングを推奨しています。対象物のエッジ特徴を反映した点群モデルを作成する必要があります。
|
マッチング方法
| パラメータ | 説明 | 説明図 |
|---|---|---|
マッチング方法 |
パラメータ説明:このパラメータは、3D高精度マッチングの方式を選択するために使用されます。
|
|
GMMモードパラメータ設定
| パラメータ | 説明 | 説明図 |
|---|---|---|
マッチングモード |
初期値:標準 オプション:高速、標準、高精度
|
|
反復回数 |
初期値:30
|
|
標準偏差 |
初期値:3.000 mm
|
|
標準偏差減衰の更新ステップサイズ |
初期値:3
|
|
多数の対象物のマッチングを高速化 |
初期値:チェックを入れない。
|
最近点モードのパラメータ設定
反複設定
| パラメータ | 説明 |
|---|---|
最近点の検索半径 |
初期値:10.000 mm
|
平均二乗誤差しきい値 |
初期値:0.001
|
ウィンドウサイズ |
初期値:10
|
対応する点を表示 |
初期値:チェックを入れない
|
複雑形状の対象物であるか |
初期値:チェックを入れない
|
反復ポイントペアの重みを自動的に計算 |
初期値:チェックを入れない
|
ポイントペアの除去設定
| パラメータ | 説明 |
|---|---|
異常ポイントペア除去 |
初期値:チェックを入れない
|
ポイントペア除去シグマ複数しきい値 |
初期値:1.0000
|
ポイントペア角度差のしきい値 |
初期値:45°
|
反復で重みを使用 |
初期値:チェックを入れない
|
重複ポイントペア除去 |
初期値:チェックを入れない
|
重複点群タイプ除去 |
初期値:MinDis オプション:MinDis、GlobalMin 調整説明:このパラメータはペアポイントの重複対応を削除する方法を選択します。二つの方法があります。
|
サンプリング設定
| パラメータ | 説明 | 説明図 |
|---|---|---|
サンプリング間隔 |
初期値:5.000 mm
|
|
結果検証設定
| パラメータ | 説明 | 説明図 | ||
|---|---|---|---|---|
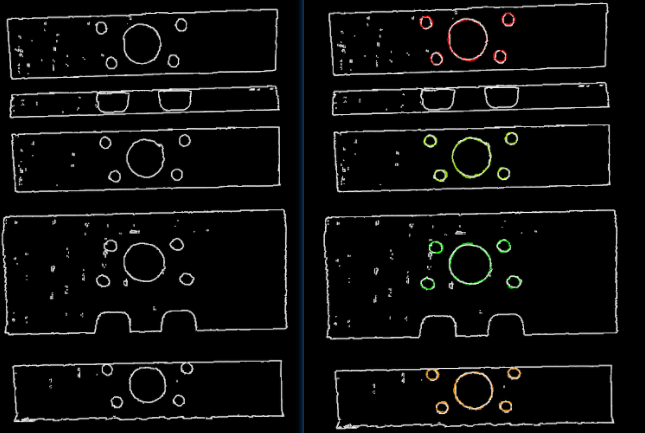
信頼度しきい値 |
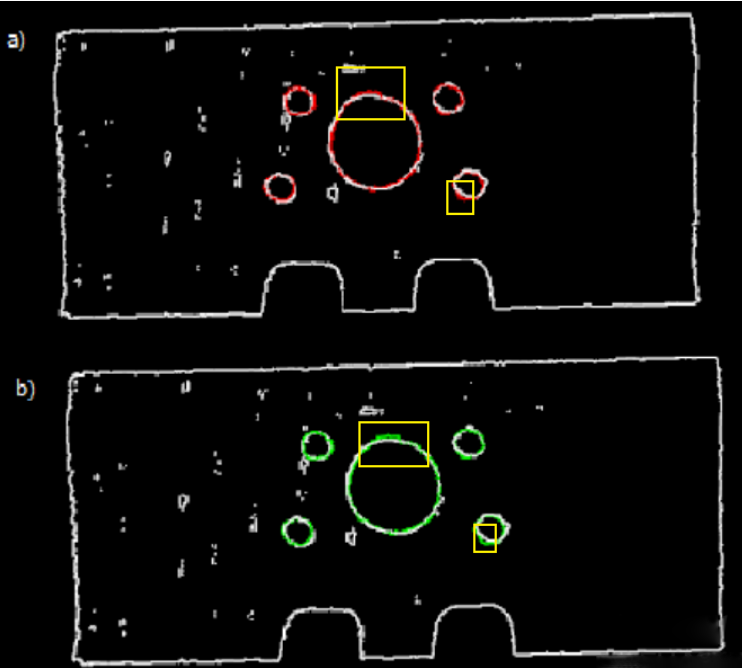
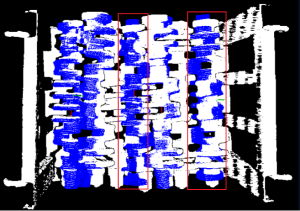
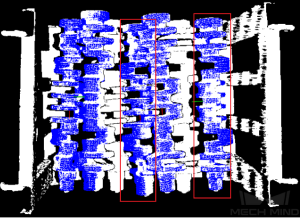
初期値:0.5 有効範囲:[0,+∞) 調整説明:結果の検証スコアがこのしきい値よりも大きい場合、結果は有効であると見なされます。高いしきい値有効なマッチングが少なくなることを意味しますが出力の精度は高くなります。低いしきい値は有効なマッチングが多くなることを意味しますが出力の精度は低くなります。 調整の例:下図では、aの 信頼度しきい値 は0.500で、bの値は0.92です。bの点群マッチングの結果はaより精度が高いです。そのため、 信頼度しきい値 が大きいほど、精度の高いマッチングの結果が保持される可能性は高くなります。
|
|
||
結果検証の検索半径 |
パラメータ説明:シーン点群とモデル点群の距離がこの値より小さい場合、シーン点群とモデル点群は重なっているとみなされます。重なっている点が多いほど、マッチング結果の検証スコアが高くなります。 初期値:10.000mm 調整説明:このパラメータの値はマッチングスコアに影響します。この値が大きいほど、マッチング結果の検証が甘くなり、位置姿勢のマッチング精度が出なくても位置姿勢のマッチングスコアが高くなります。この値が小さいほど、マッチング結果の検証が厳しくなります。対象物の点群に応じて設定する必要があります。点群がまばらな場合は、パラメータを少し大きく設定する必要があります。
|
詳細設定
詳細設定に新たに追加した調整可能なパラメータについて説明します。基本設定と同じパラメータがあれば、 基本設定 をご参照ください。
対称性設定
認識する部品が局所対称性を持つ場合、局所最適解を回避するために、対称性を設定する必要があります。
対象物中心点の軸を回転軸として指定することにより、モデルは設定された軸を中心に回転してマッチングし、最適なマッチング結果を取得します。
| パラメータ | 説明 |
|---|---|
対称回転軸 |
初期値:ROTATE_BY_Z
|
対称角度ステップサイズ |
初期値:360°
|
最小回転角度 |
初期値:-180°
|
最大回転角度 |
初期値:180°
|
調整の例
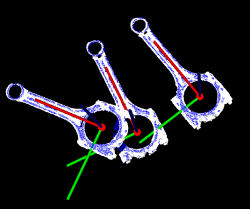
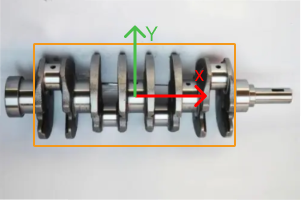
下図に示すクランクシャフトの場合、その主要部分、つまりボックス内の部分は、Y軸に沿って180°対称です。
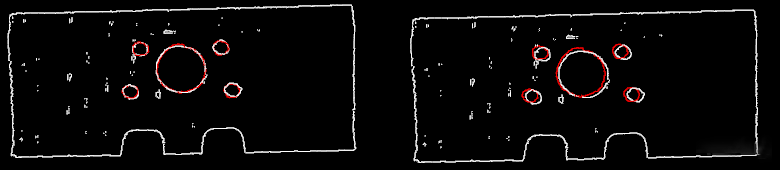
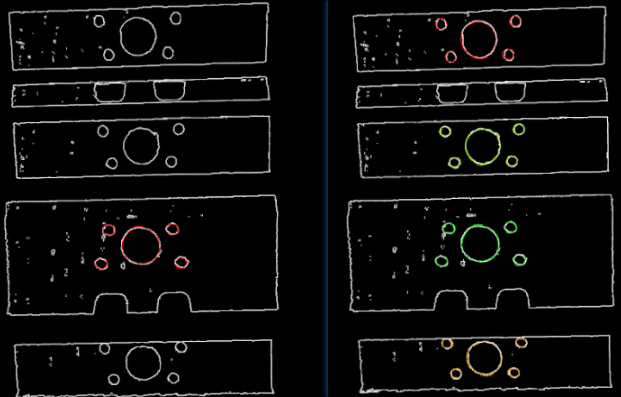
対称性が設定されていない場合、下図に示すように、局所的な形状が類似しているため、マッチング結果が局所最適になり、マッチングエラーが発生する可能性があります。
エラー結果を分析すると、モデルはクランクシャフトの中間部分のみにマッチングします。モデルがマッチング中に180°回転した後にマッチングを試行すると、クランクシャフト全体がマッチングします。また、そのマッチングスコアは、回転前のマッチングスコアよりも高くなるはずです。そうすれば、正しい結果を得ることができます。
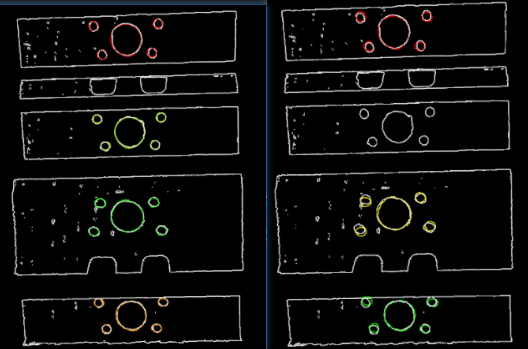
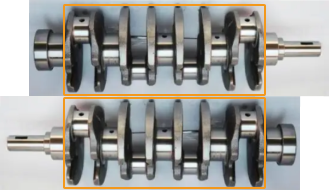
下図に示すように、対称回転軸をROTATE_BY_Y(対象物中心点のY軸)に設定し、対称角度ステップサイズを180°に設定すると、正しいマッチング結果が得られます。
位置姿勢フィルタリング設定
| パラメータ | 説明 |
|---|---|
モデルの回転角度による位置姿勢をフィルタリング |
パラメータ説明:エッジマッチングモードでは、シーンの点群にマッチングするために点群モデルをある角度だけ回転させる必要がある場合があり、点群モデルの回転角度で位置姿勢が除去されます。モデルの回転角度が「角度差の上限しきい値」を超えると、その位置姿勢は除去されます。
|
角度差の上限しきい値 |
詳細については、「モデルの回転角度による位置姿勢をフィルタリング」パラメータの説明をご参照ください。
|
検証時のモデルの重み
認識する部品の「主体」が類似して「局所」だけが異なった場合、モデルの「局所」の重みを大きくして「局所」のマッチングの結果を出力します。
| パラメータ | 説明 |
|---|---|
モデルの重みファイル |
調整説明:このファイル(ply形式)は元の点群モデルファイルの一部分の点群で、点群のこの部分は重みが高く、パラメータ 重み値 によって設定されます。 |
重み値 |
初期値:2.0
|
重み設定の検索半径 |
初期値:3.000 mm
|
結果検証設定
| パラメータ | 説明 |
|---|---|
法線ベクトルの角度偏差を考慮 |
パラメータ説明:マッチング結果を検証する際、シーン点群とモデル点群の対応点との法線ベクトルの角度差を考慮します。チェックを入れると、出力されるマッチの数は減りますが、マッチの精度は向上します。
|
スコアに対応する点がシーンの点群に占める比例をかける |
初期値:チェックを入れない
|