Waypoint Type
Waypoint Type Description
TCP |
The waypoint will be represented by the X, Y, Z values, Euler angles, quaternions or rotation vectors in the tool reference frame.
|
JPs |
The waypoint will be represented by the joint positions of the robot.
|
Target object pose |
The waypoint will be represented by the X, Y, Z values, Euler angles, quaternions or rotation vectors in the object reference frame. It focuses on describing the position and orientation of the actual target objects that need to be operated or handled when the robot is performing tasks.
|
| When the waypoint type is set to Target object pose, please do not adjust the pick points by using pose adjustment Steps in Mech-Vision, as this may result in inaccurate picking. |
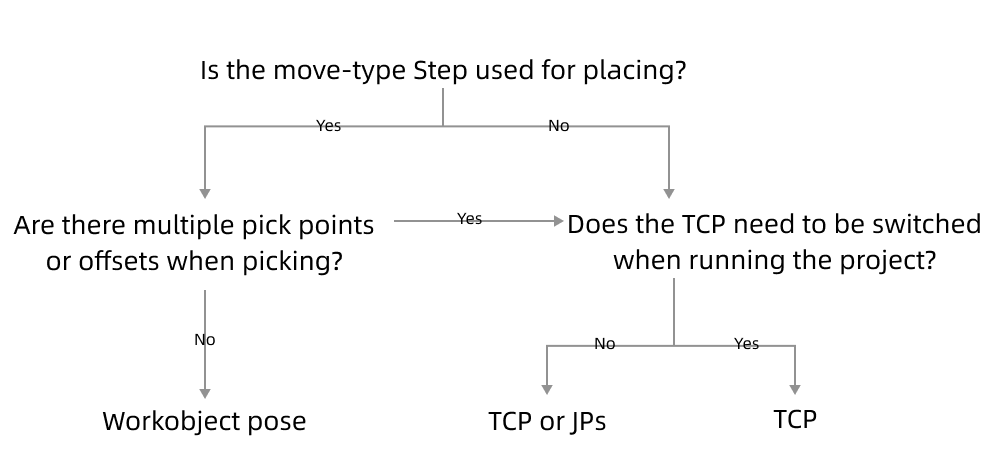
The method to determine the waypoint type is shown in the figure below.
Parameter Description
Pose tool |
Transform pose |
Transform the current pose to a new one. It is suitable for fine-tuning. |
Rectify pose |
Set the coordinate of P1, P2, and P3 according to the instruction, and then rectify the object pose with the three-point method. It is suitable for scenarios where the objects are tilted and their poses cannot be easily determined. For instance, when a cuboid tilts, its pose is hard to determine. Rectify pose can be used here to calculate the pose of the cuboid and therefore the robot can move to the rectified pose. |
|
Edit pose |
Enter quaternions or Euler angles directly to adjust the pose. You can also copy and paste the pose. |
|
Edit JPs |
Similar to the Edit pose feature. You can copy and paste the JPs in either radians or degrees. |
|
Set waypoint |
Read the current pose of the simulated robot and set it as the waypoint. |
|
Move simulated robot |
Move the simulated robot to the pose defined in the current waypoint. |
|
Show all JPs |
Show all the joint position solutions to the current waypoint. |
|
Teach target object pose |
Record the target object pose obtained by jogging the robot. |
|