Select Proper Hand-Eye Calibration Process
Hand-eye calibration refers to the process of establishing the correspondence between the camera frame and the robot frame. Through hand-eye calibration, the poses of objects or features obtained by the camera can be accurately transformed into poses in the robot frame. The accuracy of hand-eye calibration is one of the important factors affecting the accuracy of robot operations.
After the Mech-Mind 3D Measurement System is constructed, you can start the hand-eye calibration. In addition, you need to perform hand-eye calibration again in any of the following conditions:
-
The camera moves in reference to the robot base (in the eye-to-hand setup) or flange (in the eye-in-hand setup).
-
The camera is replaced.
-
The robot is replaced.
-
The robot’s working environment or layout changes.
-
The requirement for picking accuracy increases.
-
A collision or movement causes changes in the position of the robot or camera.
-
Issues with inaccurate picking arise and the extrinsic parameter errors increase.
-
The camera intrinsic parameters have been corrected.
-
The application runs for a long time (to ensure system stability, it is necessary to periodically perform hand-eye calibration again).
Select the Proper Calibration Process
The calibration procedures are affected by robot communication modes, camera mounting modes, calibration modes, and calibration data collection methods. Mech-MSR provides standardized calibration procedures for various scenarios, helping you calibrate the camera’s intrinsic and extrinsic parameters quickly and accurately.
|
For explanations of the robot communication modes, camera mounting modes, calibration modes, and calibration data collection methods, refer to the section Calibration-related Concepts. |
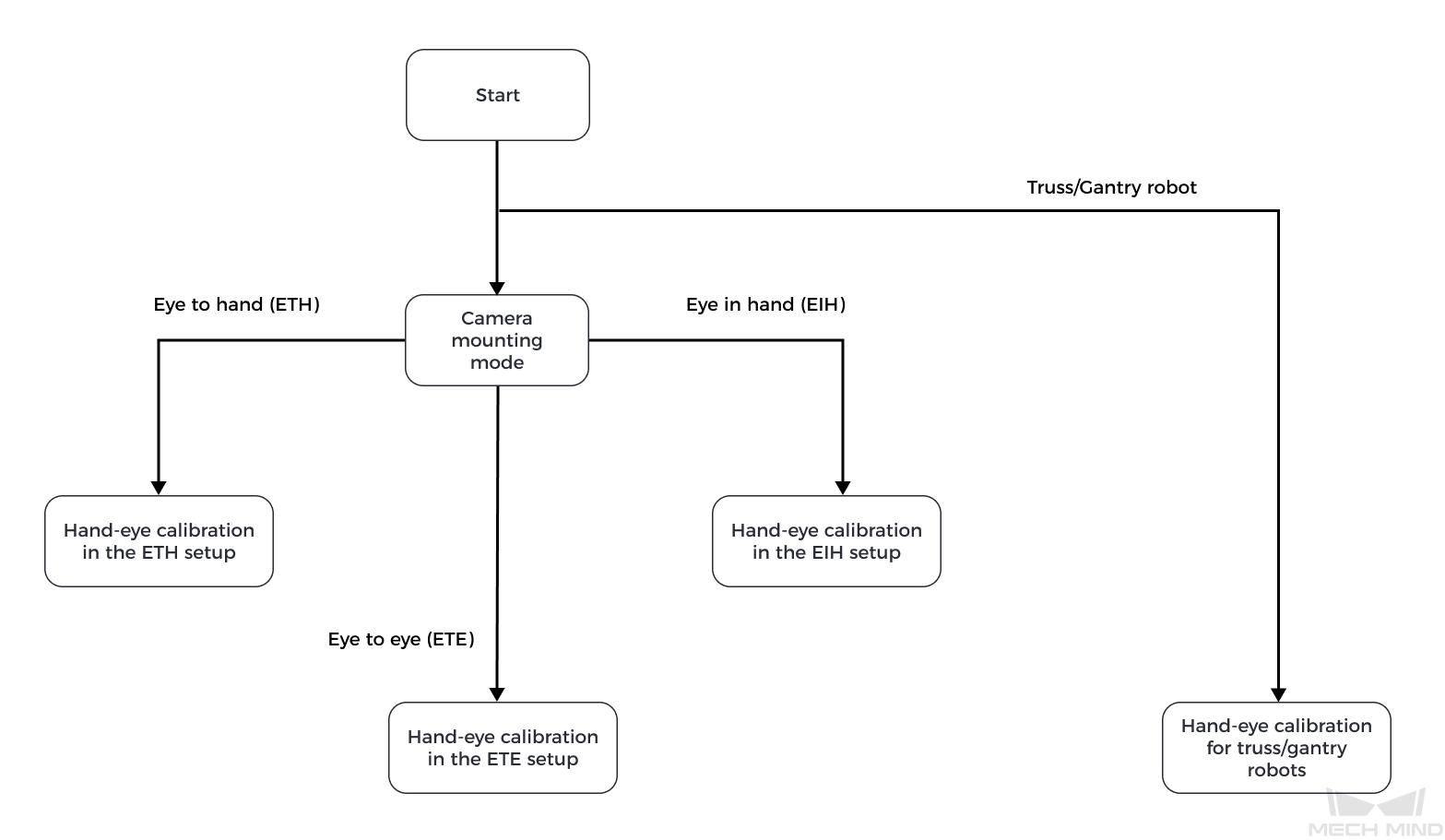
Please select the calibration processes according to the camera mounting modes.
-
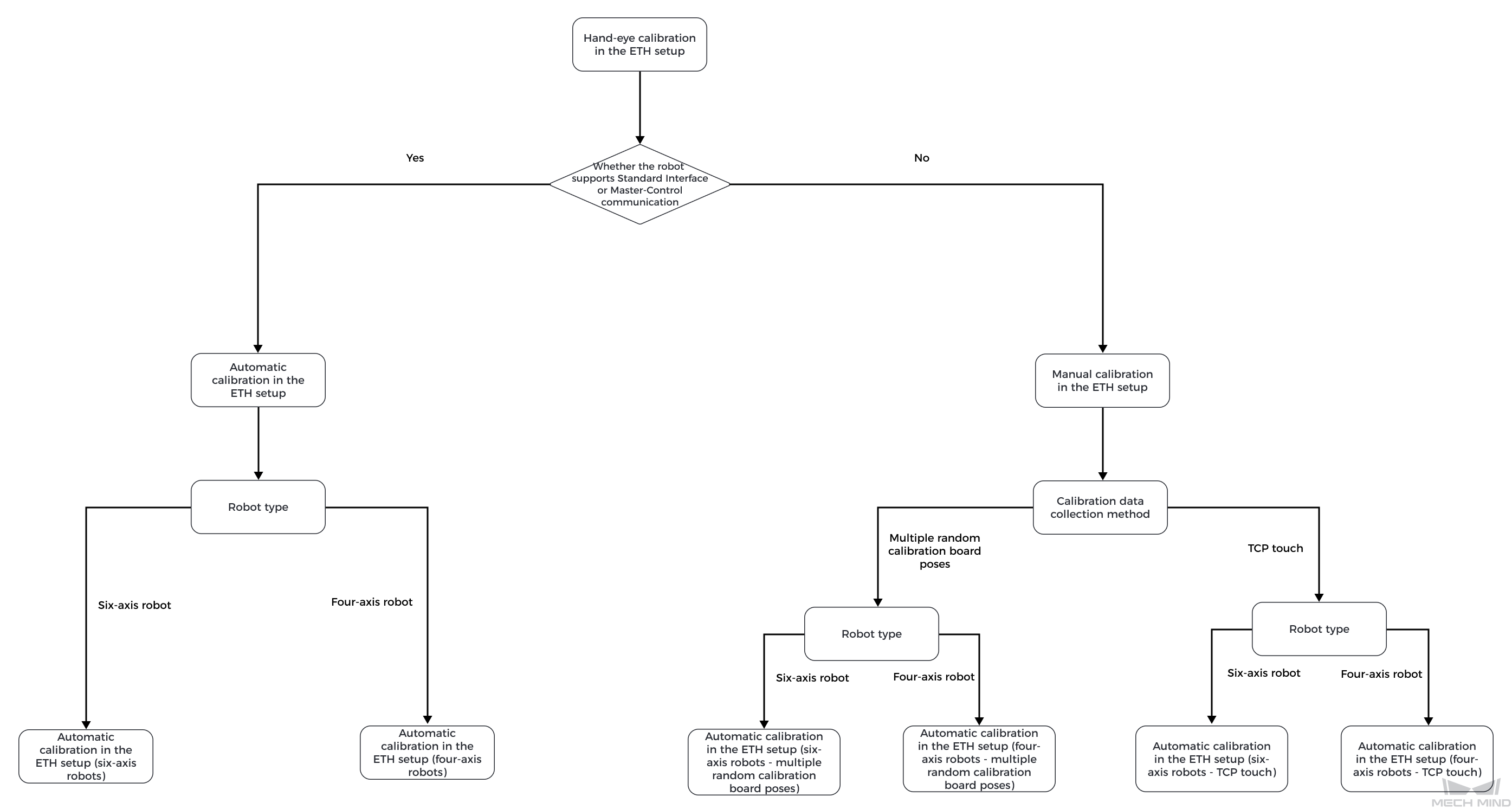
If the camera mounting mode is eye to hand (ETH), go to Hand-Eye Calibration in the ETH Setup for further selection.
-
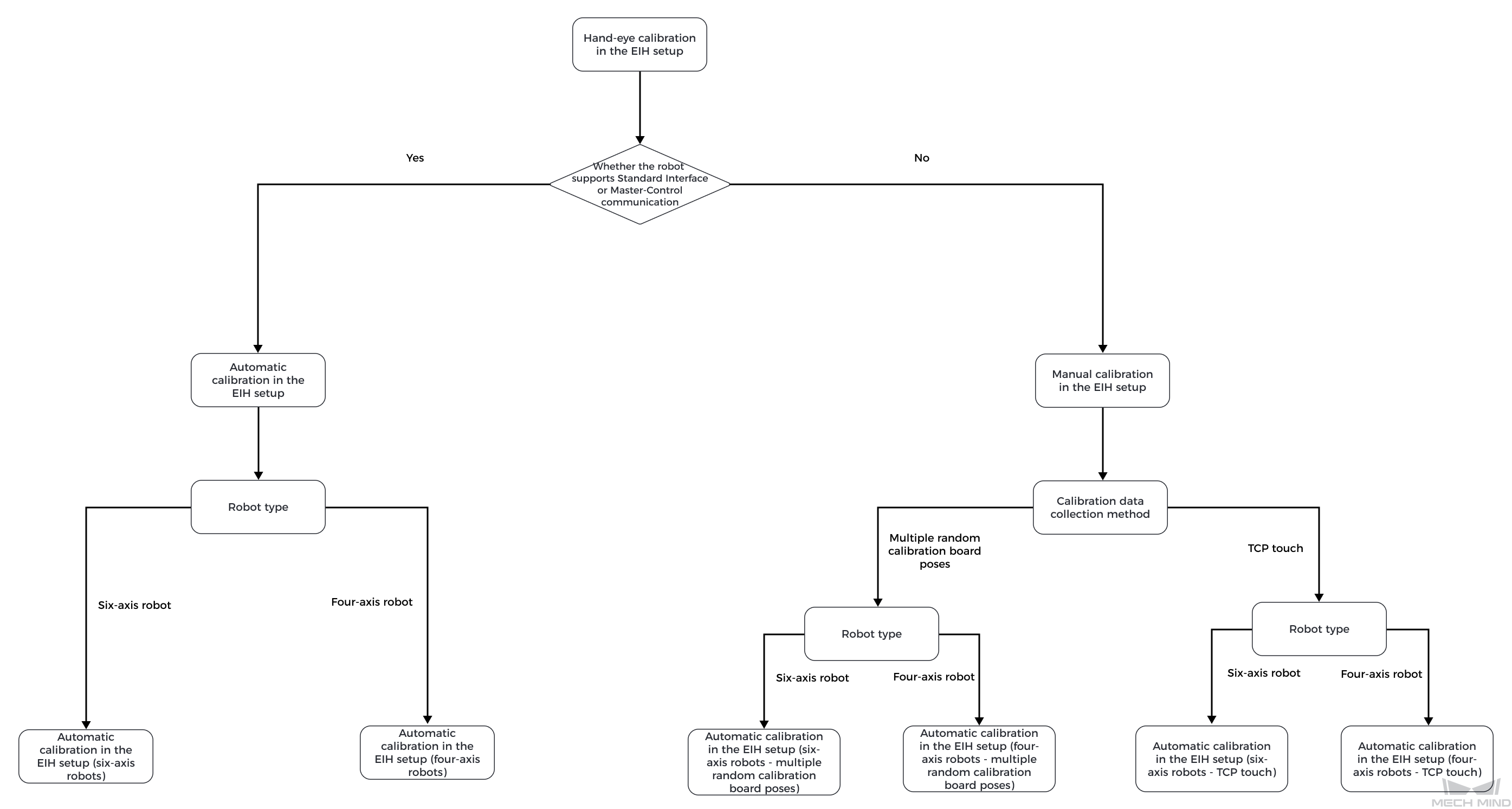
If the camera mounting mode is eye to hand (ETH), go to Hand-Eye Calibration in the EIH Setup for further selection.
-
If the camera mounting mode is eye to eye (ETE), follow the process of Hand-Eye Calibration in the ETE Setup.
| If a gantry robot is used in a project, follow the process of Hand-Eye Calibration for Gantry Robots. |