Plan History
Overview
The overall plan history is laid out in a tree structure, which contains every node in the whole process of path planning from Mech-Viz.
Comparing to the log, plan history contains more details of every node (especially when there is an error) in the process.
-
Some errors are serial errors, which means that if the error occurs at one of the nodes, the final plan result will fail. For example, the TCP of a fixed waypoint is set wrong, and the robot cannot move to the planned waypoint.
-
Some errors are parallel errors, which means that the final plan result will still succeed if the planning at one of the parallel nodes is successful. For example, when the robot attempts to pick with the pick points sent by Mech-Vision, if either one of the pick points works, the target object can be picked successfully.
| You can focus on the nodes where errors occur when running the project. |
Visualize Collision
Compute and Record Collision Contacts
During project tuning, in order to record the complete collision contact and save it to the plan history, please click Improve Performance in the toolbar and disable Perform only coarse point cloud collision calculations before you simulate or run the project.
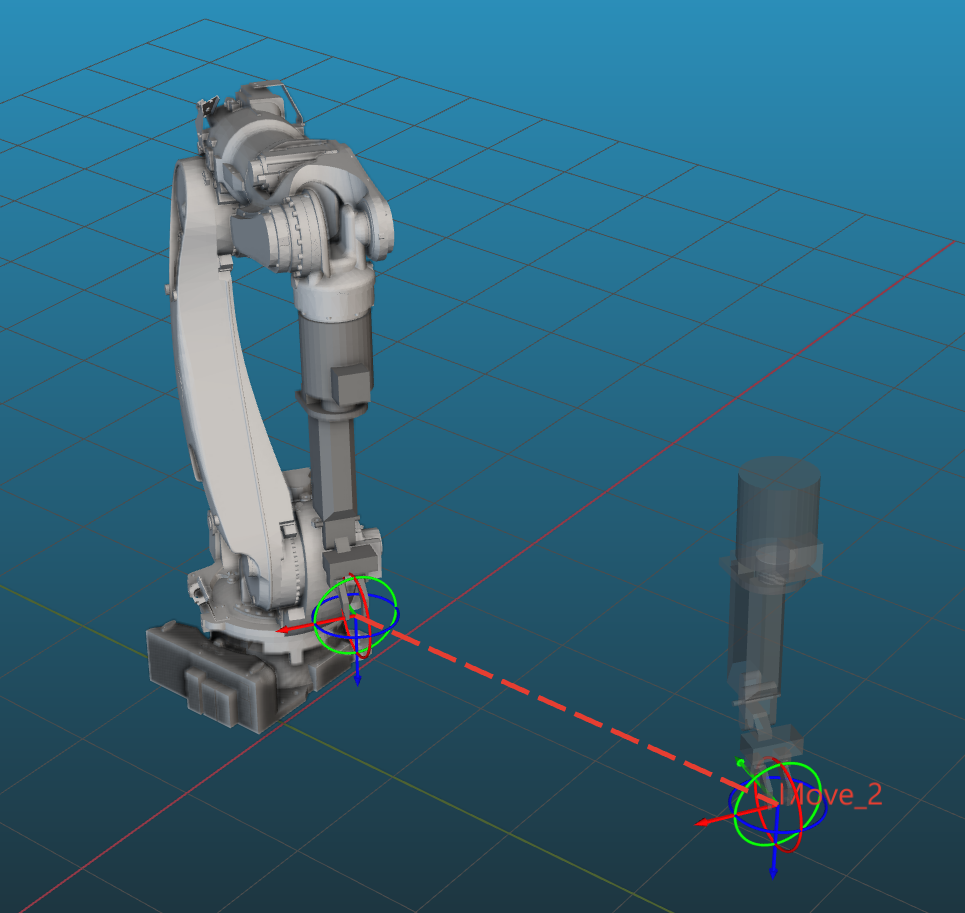
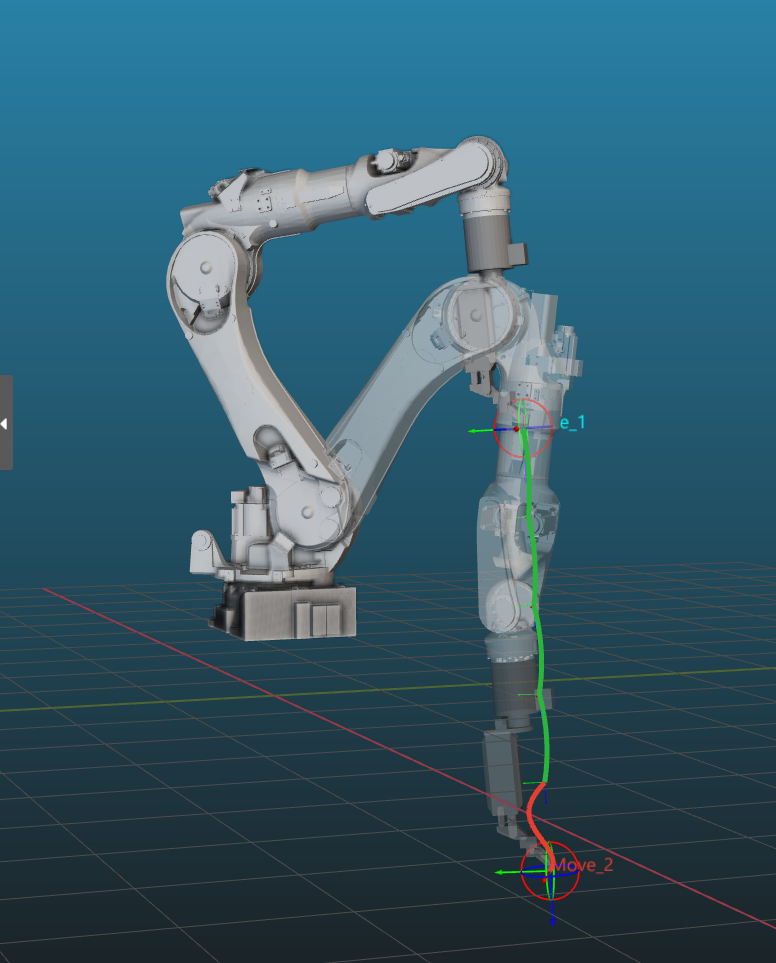
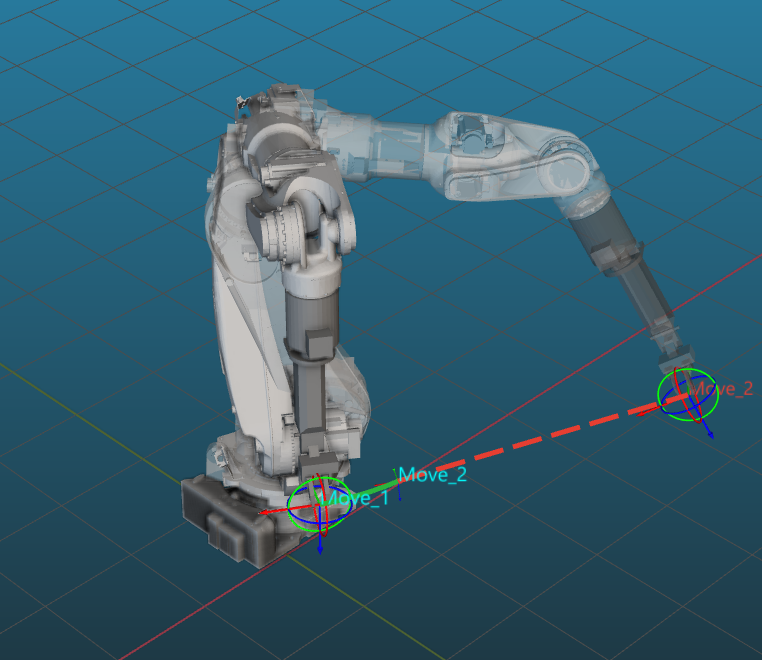
Visualization of the Path Planning Result
Click any item in the plan history, and the animation corresponding to the current plan is displayed, including:
-
The green solid line represents a successful path.
-
The red solid line represents a path with collisions.
-
The red dashed line represents an unreachable path.
-
The yellow ball on the line shows the path of the TCP.
-
The highlighted parts represent the areas where collisions occur.
Causes of Common Failures and Fixes
The causes of the failures in the plan history and the corresponding solutions are described below.
Waypoint unreachable
| Possible Causes | Fixes |
|---|---|
Inappropriate pick point |
Add more pick points or pick point arrays according to the actual situation. If the target object is symmetric, you can configure the Rotational symmetry of held target object in the target object editor. In addition, you can configure the translational relaxation or rotational relaxation for the tool in the target object editor to provide more picking methods. |
Inappropriate fixed waypoint |
Adjust the fixed waypoint(s) to the reasonable location in the workspace. |
Inappropriate site layout |
Adjust the site layout so that all waypoints can be within the reachable range of the robot. |
Waypoint unreachable (Exceeds soft limits)
| Possible Causes | Fixes |
|---|---|
Strict soft limits |
In the robot panel, widen the soft limits by adjusting the upper and lower thresholds according to the actual situation. |
Inappropriate pick point |
Add more pick points or pick point arrays according to the actual situation. If the target object is symmetric, you can configure the Rotational symmetry of held target object in the target object editor. In addition, you can configure the translational relaxation or rotational relaxation for the tool in the target object editor to provide more picking methods. |
Inappropriate fixed waypoint |
Adjust the fixed waypoint(s) to the reasonable location in the workspace. |
Inappropriate site layout |
Adjust the site layout so that all waypoints can be within the reachable range of the robot. |
Waypoint unreachable (Violates joint position constraints)
| Possible Causes | Fixes |
|---|---|
Inappropriate joint position constraints |
In the Basic move settings of move-type Steps, adjust the JPs constrains according to the actual situation. If an option under JPs constrains in the Basic move settings is set to Auto, you can adjust the corresponding option under Global JPs constrains in the Others panel. |
Inappropriate pick point |
Add more pick points or pick point arrays according to the actual situation. If the target object is symmetric, you can configure the Rotational symmetry of held target object in the target object editor. In addition, you can configure the translational relaxation or rotational relaxation for the tool in the target object editor to provide more picking methods. |
Inappropriate fixed waypoint |
Adjust the fixed waypoint(s) to the reasonable location in the workspace. |
Inappropriate site layout |
Adjust the site layout so that all waypoints can be within the reachable range of the robot. |
Robot singularity (Joint velocity exceeds the limit)
| Possible Causes | Fixes |
|---|---|
Inappropriate site layout |
Adjust the robot pose to prevent it from moving near the singularity. |
Long linear motion with inappropriate motion type |
Change the Motion type in the Basic move settings of the move-type Steps from Linear move to Joint move. |
When it is necessary to maintain linear motion as much as possible, enable Singularity avoidance in the Basic move settings of the move-type Steps. |
|
Inappropriate settings of singularity detection parameters |
If the actual robot has not reached a singularity, you can go to the Others panel and adjust the parameters under Singularity detection to avoid excessive singularity detection. Typically, you can set the Detection method of the Singularity detection to Detect velocity of each joint and increase the Max velocity or decrease the Reduction ratio. |
Robot singularity (unable to reach the target waypoint in linear motion)
| Possible Causes | Fixes |
|---|---|
Inappropriate site layout |
Adjust the robot pose to prevent it from moving near the singularity. |
When the Waypoint type is TCP or Target object pose, the singularity occurs in the linear motion |
Change the Motion type in the Basic move settings of the move-type Steps from Linear move to Joint move. |
When it is necessary to maintain linear motion as much as possible, enable Singularity avoidance in the Basic move settings of the move-type Steps. |
|
When the Waypoint type is JPs, the linear motion results in the singularity |
Change the Waypoint type to TCP. |
Change the Motion type in the Basic move settings of the move-type Steps from Linear move to Joint move. |
|
When it is necessary to maintain linear motion as much as possible, enable Singularity avoidance in the Basic move settings of the move-type Steps. |
Robot singularity (Approaching the singularity region)
| Possible Causes | Fixes |
|---|---|
Inappropriate site layout |
Adjust the robot pose to prevent it from moving near the singularity. |
When the Waypoint type is TCP or Target object pose, the singularity occurs in the linear motion |
Change the Motion type in the Basic move settings of the move-type Steps from Linear move to Joint move. |
When it is necessary to maintain linear motion as much as possible, enable Singularity avoidance in the Basic move settings of the move-type Steps. |
|
Inappropriate settings of singularity detection parameters |
If the actual robot has not approached a singularity, you can go to the Others panel and adjust the parameters under Singularity detection to avoid excessive singularity detection. Typically, you can adjust the Select joint and Angle lower/upper limit. |
Unable to avoid singularity (Path deviation exceeds the limit)
| Possible Causes | Fixes |
|---|---|
Low thresholds set in Singularity avoidance |
In the Parameter settings of Singularity avoidance, appropriately increase the Max position/angle deviation. |
Unable to avoid the singularity |
Change the Motion type in the Basic move settings of the move-type Steps from Linear move to Joint move. |
Insufficient Number of segments in Singularity avoidance |
In the Parameter settings of Singularity avoidance, if the Limit to motion segments is set to Specific number, you can appropriately increase the Number of segments. |
Unable to avoid singularity (Unreachable waypoint exists)
| Possible Causes | Fixes |
|---|---|
Inappropriate site layout |
Adjust the robot pose to prevent it from moving near the singularity. |
Unable to avoid the singularity |
Change the Motion type in the Basic move settings of the move-type Steps from Linear move to Joint move. |
Collision
Refer to Troubleshoot Collisions in Simulation for more information.