Extract 3D Points in Cuboid
Function
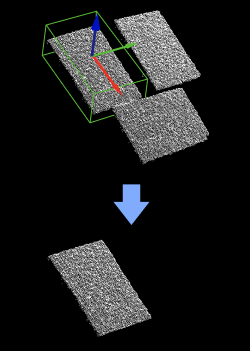
Extract point clouds inside specified cuboids and discard the point clouds outside the cuboids.
Usage Scenario
A general point cloud extraction Step. No fixed usage scenarios. The dimensions of the cuboids can be input from the port or set by parameters.
Input and Output
Input
| Input port | Data type | Description |
|---|---|---|
Point Clouds |
PointCloud/XYZNormal[] |
Point clouds in the input list of this port will have points extracted. |
Box Poses |
Pose[] |
List of cuboid center poses. |
Half Lengths on X-Axis of Boxes |
Number[] |
Half of the X-length of the cuboid (optional). |
Half Lengths on Y-Axis of Boxes |
Number[] |
Half of the Y-length of the cuboid (optional). |
Half Lengths on Z-Axis of Boxes |
Number[] |
Half of the Z-length of the cuboid (optional). |
Parameter Description
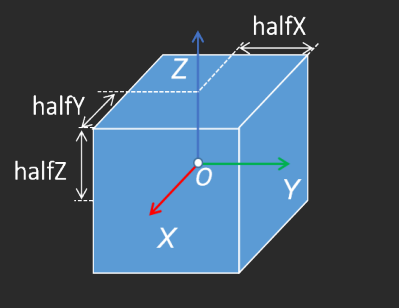
Box Dimensions’ Settings
| Parameter | Description | Illustration |
|---|---|---|
Half Length of Box on X-Axis |
Default value: 100.000
|
|
Half Length of Box on Y-Axis |
Default value: 100.000
|
|
Half Length of Box on Z-Axis |
Default value: 100.000
|
|