Rotate poses around Given Axis
Function
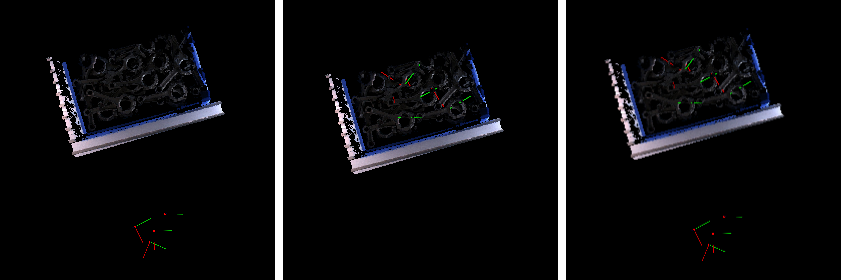
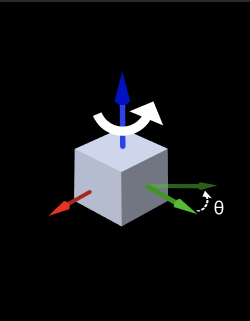
This Step rotates poses around a specified axis. The pose orientation can be adjusted precisely by setting the rotation axis and rotation angle.
Usage Scenario
This Step is a general pose adjustment Step with no fixed usage scenarios.
This Step is outdated. Please use the new Step Rotate Poses around Axis by Angle instead and use it with the Step Easy Create 3D Vectors.
Parameter Description
Visualization Settings
| Parameter | Description
|
|---|---|
Pose Type to Visualize |
Description: This parameter is used to select the pose type to visualize.
|
Reference Direction
| Parameter | Description |
|---|---|
X |
Description: This parameter sets the X component of the direction vector of the specified rotation axis.
|
Y |
Description: This parameter sets the Y component of the direction vector of the specified rotation axis.
|
Z |
Description: This parameter sets the Z component of the direction vector of the specified rotation axis.
|