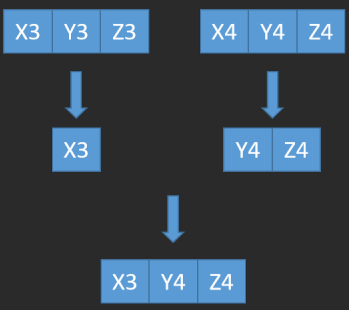
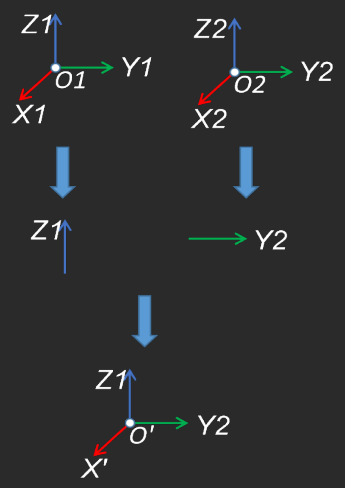
Compose New Poses by Combining Parts of Input Poses
Function
This Step is used to combine the specified parts of input poses into a new pose, supporting flexible axes selection and directional synthesis.
Input and Output
Input
| Input port | Data type | Description |
|---|---|---|
Z-Axis Orientation |
Pose[] |
Poses that provide the Z directions. |
Y-Axis Orientation |
Pose[] |
Poses that provide the Y directions. |
Base Position |
Pose[] |
Initialized positions of output poses. |
Configurable Position |
Pose[] |
Pose positions used to override the initialized positions (whether to override depends on the parameter settings). |
Parameter Description
Visualization Settings
| Parameter | Description | ||||
|---|---|---|---|---|---|
Show Point Cloud In Selected Frame |
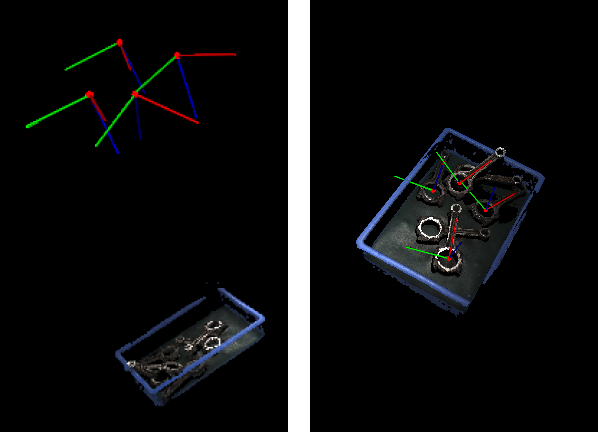
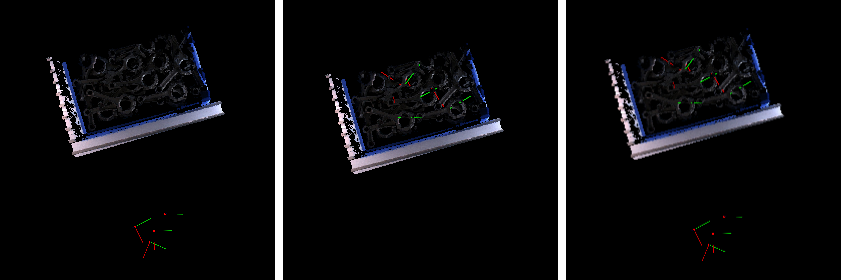
Description: Display point cloud under the robot reference frame or the camera reference frame. Default value: Robot Coordinate Value list: Robot Coordinate, Camera Coordinate Instruction: When this parameter is set to Robot Coordinate, the Debug Output panel will display the visualized output under the camera reference frame; when it is set to Robot Coordinate, the panel will display the visualized output under the robot reference frame. Please refer to the tuning example for the corresponding result.
|
||||
Pose Type to Visualize |
Description: This parameter is used to select the pose type to visualize.
|
| Parameter | Description |
|---|---|
The Axes of Fourth Input Pose to Use |
Parameter description: This parameter is used to specify which position axes of the fourth input pose are used to control the influence of the configurable position input on the base position.
|