Compose New Poses by Combining Parts of Input Poses
Function
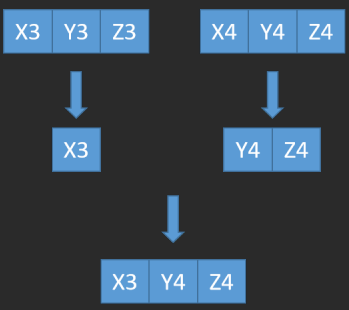
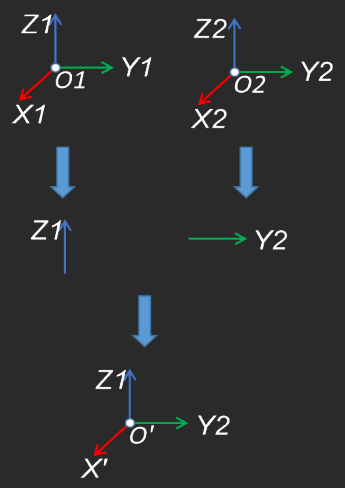
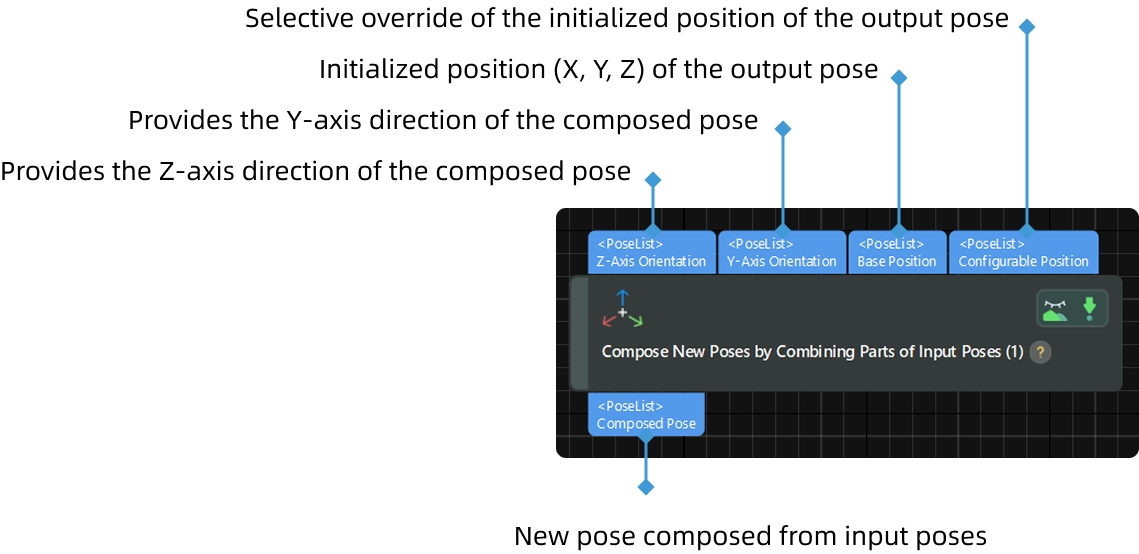
This Step is used to combine the specified parts of input poses into a new pose, supporting flexible axes selection and directional synthesis.
Parameter Description
Visualization Settings
| Pose Type to Visualize
| Description: This parameter is used to select the pose type to visualize.
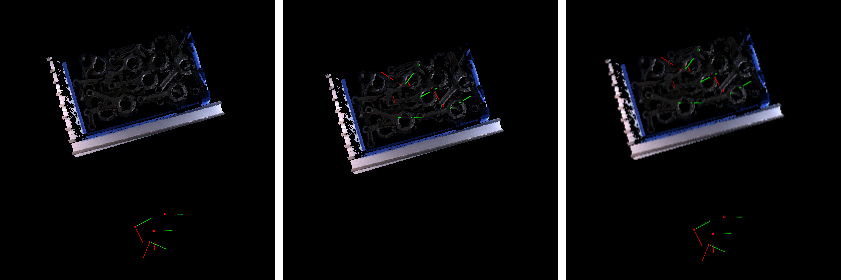
Default value: After
Value list: After, Before, and All
Instruction: Select an appropriate option according to actual needs. Please refer to the tuning example for the corresponding result.
The Axes of Fourth Input Pose to Use
Description: This parameter is used to specify which position axes of the fourth input pose are used to control the influence of the configurable position input on the base position.
Default value: X
Value list: X, Y, Z, XY, XZ, YZ, XYZ, and None
Instruction: Based on the selected value, the corresponding coordinates of the configurable position will override the respective coordinates of the base position. For example, if the parameter value is set to X, only the X coordinate of the configurable position will override the X coordinate of the base position, while the Y and Z coordinates remain unchanged. If None is selected, the configurable position input will be completely ignored, and only the coordinates of the base position are used.