Pose Status Details
| Status | Description |
|---|---|
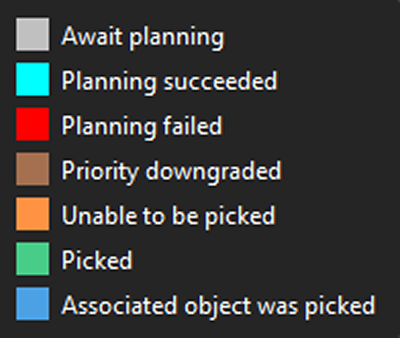
Awaiting planning |
During the query of the status, the pose has not been used for path planning yet. Or a “Classify” Step has been added before the “Vision Move” Step. Due to filtering by the “Classify” Step, this pick point is excluded from the current round of the path planning. |
Plan succeed |
The pick point has been used for path planning successfully. |
Plan failure |
Failed to plan a path with this pick point. Please refer to the Plan history for the specific cause. |
Priority downgraded |
The Avoid Picking on Same Target Object feature is enabled in the “Vision Move” Step. Since this pick point is too close to a previously used pick point or a previously picked target object, its picking priority has been downgraded. |
Unable to be picked |
The cause of a picking failure can vary. Please refer to Unpickable Causes. To view the specific cause, you can also double-click the pick point name in the 3D simulation area and check the Vision Result Details window that pops up. |
Picked |
This pick point has been successfully used to pick a target object. |
Associated object was picked |
The target object associated with this pick point has already been picked. |
Unpickable Causes
| Cause | Description | Solutions |
|---|---|---|
Inconsistent target object info |
The pick point has been filtered out by the Filter Vision Result > Filter Poses feature of the “Vision Move” Step. |
If you want this pick point involved in path planning, please go to the corresponding “Vision Move” Step to modify the Filter Poses setting and specify to use only that pick point, the corresponding target object or the label. If you want other pick points involved in path planning, please set Filter Poses as Use all. |
Duplicate target object |
The Avoid Picking on Same Target Object function is enabled in the “Vision Move” Step, and the Keep Last Exec State function is enabled in the toolbar. Therefore, the pick point has been filtered out because it is too close to a previously planned and recorded pick pose. |
If you want this pick point involved in path planning, please go to the corresponding “Vision Move” Step to set a smaller value for the Discard Attempt Radius under the Filter Out Unlikely Pick Point; or you can also unselect the Filter Out Unlikely Pick Point. |
No available tool |
The tool used for the current path planning does not match this pick point. Please refer to the log for the specific tool in use. |
If you want the pick point involved in the path planning, please use the Change Tool Step to change the tool to one that matches the pick point. If you need to modify the tool configuration or the picking point, please open the target object editor, navigate to the Set pick point, and adjust the settings under Picking configuration. |
Parsing failure |
There are four main possible causes for the failure: 1. The target object ID corresponding to the pick point is not found in the target object list. 2. Pose parsing failed. 3. The corresponding pick point name is not found in the target object editor. 4. The target object name corresponding to the pick point is not found in the target object editor. Please refer to the log for the specific cause for the failure. |
If a vision project is being called, please check whether the settings of the “Output” Step in the vision project are correct. If vision records are used for simulation, ensure their format is correct. You can delete the incorrect vision records or re-run the vision project to obtain vision results in the correct format. |
Out of bin |
The Filter Vision Result > Result Must Be in Specified Bin feature of the “Vision Move” Step is enabled. Th pick point is filtered out because it is out of the specified bin. |
If the corresponding pose is incorrect, please check and modify the vision project to provide the correct pose. If the selection of the bin is wrong, please go to the corresponding “Vision Move” Step, and select the correct bin in the Filter Vision Result > Result Must Be in Specific Bin settings. If you do not need the vision result to be in specific bin, please clear your selection in the Filter Vision Result > Result Must Be in Specific Bin settings. |
Pose correction failure |
Due to the limits of robot configuration, the Z-axis direction of the pick point must align with the Z-axis direction of the robot reference frame. The posture deviation of the pick point is too large, resulting in a failed pose correction, and thus cannot be used for picking. |
If the pose cannot be corrected, please ensure the incoming materials meet standards. If the incoming materials have been standardized, please use the Steps about pose adjustment in the vision project to correct the pose. |
Pick point not specified |
Currently, vision records are being used for simulation, with the only use pose with specified index option enabled when selecting the vision record. The pick point cannot be used for picking because it has not been specified. |
If you want this pick point involved in path planning, please disable the only use pose with specified index feature when selecting the vision record. |
Depalletizing failure |
The Picking Method in the “Vision Move” Step is set to Box Depalletizing. The picking failed because the box corresponding to the pick point is surrounded by other boxes. |
No solution available at the moment. |