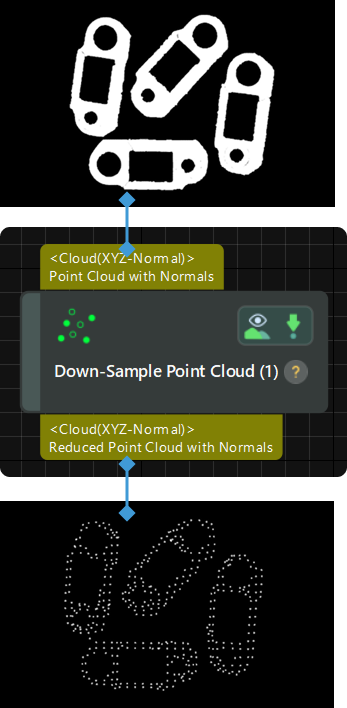
Down-Sample Point Cloud
Usage Scenario
This Step is usually used for point cloud preprocessing when there are too many point cloud points to be processed, to improve the project running speed.
Parameter Description
- Sampler Type
-
Description: This parameter is used to select the sampling method you want to use.
Value list: UniformSampler, VoxelGridSampler
-
UniformSampler: Uniform sampling method. Divide the point cloud into 3D grids of fixed size, and only the point closest to the grid center will be retained in each grid to reduce the point cloud density.
-
VoxelGridSampler: Voxel sampling method. Divide the point cloud into 3D grids of fixed size, calculate the average normals and positions of all points in each gird, generate a new point from the average, and discard the other points to reduce point cloud density.
Default value: VoxelGridSampler
Tuning recommendation: It is recommended to use the default value.
-
- Sampling Interval
-
Description: This parameter is used to set the edge length of the 3D grid during downsampling. The larger the value, the sparser the downsampled point cloud will be.
Default value: 10.000 mm