Compose Poses from Quaternions and Translation Vectors
Function
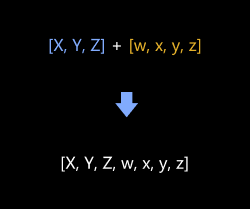
This Step combines the input rotation vectors (in quaternions) and translation vectors into poses.
Input and Output
Parameter Description
| Parameter | Description
|
|---|---|
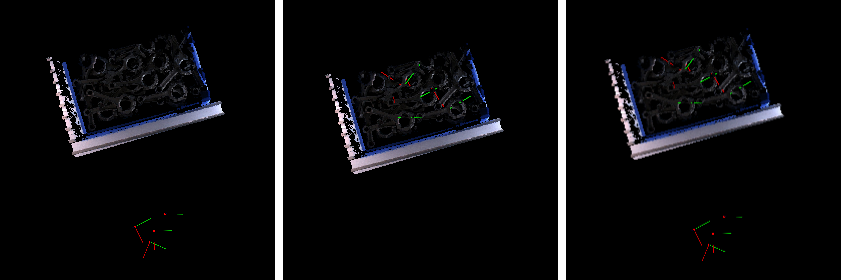
Pose Type to Visualize |
Description: This parameter is used to select the pose type to visualize.
|