Positioning and Picking (2D Template Matching)
This section introduces the target object recognition configuration workflow using the 2D template matching method. This method is used to search and locate target object features matching a template in a 2D image and calculate the target object pose. It is suitable for scenarios where target objects are recognized by their edge or prominent shape features, requiring distinct edge features and a fixed shape.
Click Config wizard, select the Positioning and Picking scenario, and select the 2D template matching recognition method to enter this configuration workflow.
Usage Workflow
The overall recognition workflow includes four steps:

-
Image preprocessing: Perform color conversion, enhancement, denoising, morphological transformations, and other preprocessing on the input image to improve image quality, highlight target object features, and reduce background interference, providing a reliable data foundation for subsequent target object recognition.
-
Target object recognition: Set the region of interest and flexibly configure matching parameters based on target object features for accurate target object recognition.
-
Target object pose calculation: Combine the 2D camera’s extrinsic calibration data and the taught data of the reference target object (i.e., the target object used for teaching) to automatically convert the recognized 2D pose of the target object into the 3D pose required for robot picking, with the 3D pose expressed in the robot frame.
-
General settings: Configure pose filtering rules and output ports to ensure that output results meet subsequent picking requirements.
Image Preprocessing
Before recognizing target objects, you can choose to enable Convert color space or Image preprocessing based on the input image quality, and adjust the corresponding parameters to make image features clearer, thereby improving recognition accuracy and efficiency.
Convert Color Space
Converting the image color space can transform the input image from one color space to another, for example, from BGR to grayscale, BGR to HSV, etc. Through color space conversion, image features can be better highlighted to facilitate subsequent image processing.
For detailed parameter description and tuning examples, please read Convert Color Space.
Image Preprocessing
In image preprocessing, you can perform enhancement, denoising, morphological transformations, grayscale inversion, edge extraction, and other preprocessing operations on the input image.
For detailed parameter description and tuning examples, please read Image Preprocessing.
Target Object Recognition
After completing image preprocessing, configure the recognition settings, including setting the recognition region of interest and adjusting template matching parameters for accurate target object recognition.
Add Recognition Parameter Group
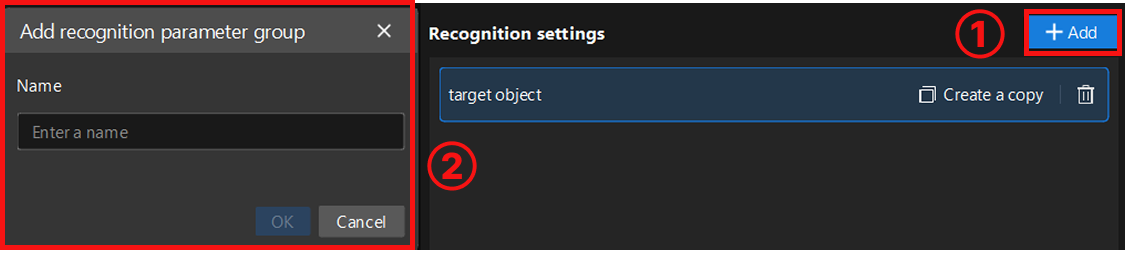
After entering the target object recognition workflow, the system will create a default recognition parameter group for managing the current recognition region of interest and related parameters.
-
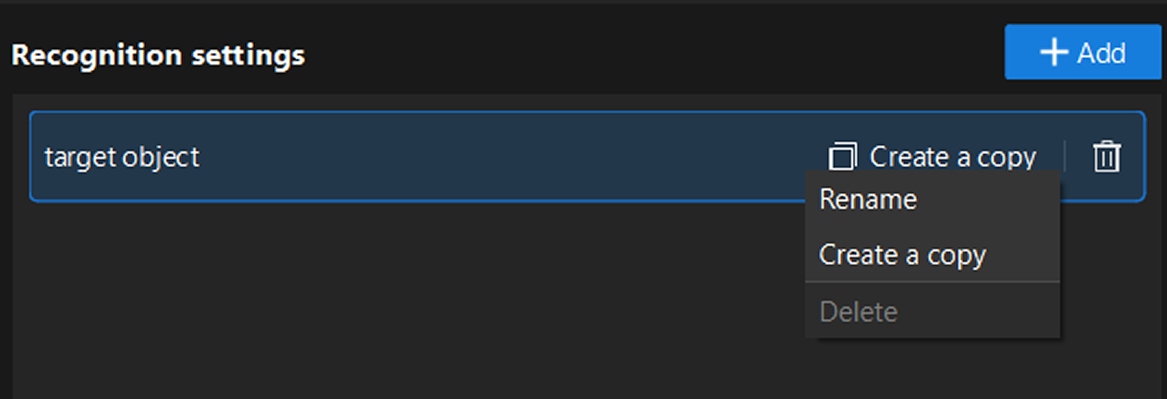
Management operations: Right-click the parameter group name, or directly click the function buttons on the right side of the parameter group to perform operations such as rename, delete, or create a copy.
-
Create new parameter group: To configure a new parameter group, click the Add button in the upper-right corner to create a new parameter group. Each parameter group can independently set recognition regions and parameters without affecting each other.
Set Recognition Region
When setting the recognition region, you can choose Set all as recognition region or Customize recognition region based on actual requirements. After selecting customize, you need to click the "Select" button to manually select the recognition region. When selecting, ensure the recognition target is within the selected range.
-
Set all as recognition region: Recognizes the entire image, typically suitable for scenarios where recognition targets are widely distributed.
-
Customize recognition region: Recognizes only the selected area, typically suitable for scenarios where you only need to focus on a specific part of the image, or want to exclude irrelevant areas (such as background, fixtures, and other interferences), helping to improve recognition efficiency and accuracy.
Recognize Target Object
Set Target Object Template
After setting the recognition region, select or edit the target object template for subsequent target object recognition. Click the Edit button to enter the 2D Matching Template Editor.
Select representative and stable edge features from the image to generate the template, so that the system can subsequently search the image automatically and accurately locate target objects that match the template features, while ensuring the uniqueness and stability of matching results. For detailed instructions, please refer to 2D Matching Template Editor.
| After each template editing, click Update to apply the latest configuration. |
Adjust Recognition Parameters
After selecting the template, if you need to recognize multiple target objects, it is recommended to first set the "Maximum number of matching results" (default value: 1) based on actual on-site requirements to limit the maximum number of matching results output each time.
After the settings are completed, click Run Step to view the template matching results and overall recognition performance.
If the recognition performance is not satisfactory, you can continue adjusting other parameters based on the actual features and recognition requirements of the target object for optimization.
For detailed parameter description, please read 2D Matching.
Then, click Next to proceed to the target object pose calculation workflow.
Target Object Pose Calculation
This workflow collects reference data through teaching operations, establishes the mapping between visual recognition results and robot picking poses, and automatically converts the real-time recognized 2D pose of the target object into the 3D pose required for robot picking, with the 3D pose expressed in the robot coordinate system.
The required teaching operations and parameters vary depending on the camera mounting method (Eye to hand or Eye in hand).
| Before starting the specific teaching operations, ensure that there is only one target object within the camera field of view (if there are other target objects, remove them from the carrier first), and click Run project so that the system only recognizes this reference target object. |
Teaching Instruction in ETH Scenario
Operation Workflow
-
Place the reference target object within the camera field of view for image capture and recognition, and keep the target object position unchanged throughout the entire teaching process.
-
Click the Acquire button to obtain the currently recognized reference target object 2D pose.
-
Use the teach pendant to control the robot to accurately reach the expected picking point of the target object. Click the Edit button to enter the robot flange pose when picking the reference target object. This flange pose is read from the teach pendant in the robot reference frame.
-
After completion, use the teach pendant to control the robot to move away from the picking point while keeping the target object position unchanged.
Parameter Description
| Parameter | Description |
|---|---|
Select camera Step |
Parameter description: This parameter is used to select the 2D camera Step that has completed extrinsic parameter calibration, to ensure the calibration data is correctly applied to the current Step. |
Reference target object 2D pose |
Parameter description: The 2D pose of the reference target object recognized during image capture. |
Reference pose for picking |
Parameter description: The robot flange pose when picking the reference target object. This flange pose is read from the teach pendant in the robot reference frame. |
Teaching Instruction in EIH Scenario
Operation Workflow
-
Use the teach pendant to control the robot to move to the image-capturing point. Click the Edit button to enter the robot flange pose at the image-capturing point. This flange pose is read from the teach pendant in the robot reference frame.
-
Place the reference target object within the camera field of view for image capture and recognition, and keep the target object position unchanged throughout the entire teaching process.
-
Click the Acquire button to obtain the currently recognized reference target object 2D pose.
-
Use the teach pendant to control the robot to accurately reach the expected picking point of the target object. Click the Edit button to enter the robot flange pose when picking the reference target object. This flange pose is read from the teach pendant in the robot reference frame.
-
After completion, use the teach pendant to control the robot to move away from the picking point while keeping the target object position unchanged.
Parameter Description
| Parameter | Description |
|---|---|
Select camera Step |
Parameter description: This parameter is used to select the 2D camera Step that has completed extrinsic parameter calibration, to ensure the calibration data is correctly applied to the current Step. |
Reference target object 2D pose |
Parameter description: The 2D pose of the reference target object recognized during image capture. |
Reference pose for picking |
Parameter description: The robot flange pose when picking the reference target object. This flange pose is read from the teach pendant in the robot reference frame. |
Flange pose during capture |
Parameter description: The robot flange pose at the image-capturing point. This flange pose is read from the teach pendant in the robot reference frame. |
Robot service name in communication component (optional) |
Parameter description: This is an optional parameter, only configured when the robot communication is disconnected and needs to be reconnected. It is used to select the robot model, which must be consistent with the robot model connected in the communication component. |
| After teaching is completed, you can place other target objects back on the carrier and click Run project again so that the system can recognize and output the poses of all target objects in batch. |
After completing the target object pose calculation, click Next to proceed to the general settings workflow.
General Settings
In this workflow, you can configure auxiliary functions beyond visual recognition, including setting pose filtering rules and configuring output ports.
Set Pose Filtering Rules
Based on actual requirements and the pose data in the Recognition result, you can set the upper and lower limits in the X, Y, and Rz directions to perform error-proofing filtering on the output target object poses. This mechanism is used to eliminate poses that may cause collisions or are not executable by the robot, ensuring that the output results are safe and usable.
Click Run Step or Run project to view the filtering status.
Configure Output Port
Here, you can select the output ports based on the actual situation of the target object. By default, the target object name and recognition pose are output.
-
Matching score: Outputs the matching score list, used to evaluate the quality of matching results.
After checking the port, the 2D Target Object Recognition Step will add the corresponding output port in real time.