Convert 2D Point to 3D Pose
Function
This Step converts the 2D pose or 2D shape of a target object detected by a 2D camera into the 3D pose in the robot coordinate system by combining camera extrinsic calibration data with taught poses.
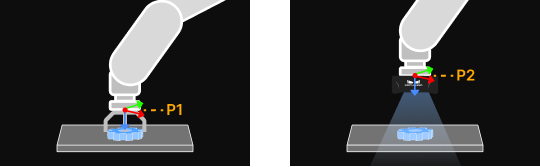
The left figure shows the taught reference pose for picking (P1), and the right figure shows the taught flange pose during capture (P2).
Usage Scenario
This Step is suitable for scenarios where a 2D vision system is used to locate target objects, and the localization results are used for robot picking, assembly, and other robotic operations. It is typically used after 2D Matching and 2DBlob Analysis, followed by Output Step or pose correction for assembly Step.
Input and Output
Parameter Description
| Parameter | Description |
|---|---|
Input Type |
Parameter description: This parameter specifies the type of input data, including 2D target object pose and 2D target object shape. |
Select Camera Step |
Parameter description: Select a 2D camera Step with completed extrinsic calibration to ensure the calibration data is correctly applied to the current Step. |
Reference Target Object 2D Pose |
Parameter description: The 2D pose of the reference target object detected at the capture point. This pose is typically obtained from the data stream output by the previous Step to this input port. |
Reference Pose for Picking |
Parameter description: The flange pose when the robot picks the reference object. This pose is the flange pose in the robot coordinate system read from the teach pendant. |
Flange Pose during Capture |
Parameter description: The flange pose of the robot at the image-capturing point in Eye-in-Hand scenarios. This pose is the flange pose in the robot coordinate system read from the teach pendant. |
Obtain Flange Pose from Parameters |
Parameter description: Once the communication is established, the "Obtain Flange Pose from Parameters" feature will be disabled automatically, and the entered robot flange pose will not be applied. Tuning instructions: If you want to re-enter the robot flange pose, please disconnect the communication and enable this feature again. |
Flange Pose during Capture |
Parameter description: Enter the robot flange pose when the camera actually captures images. |
Robot Service Name in Communication Component |
Parameter description: Enter the robot model name, which should be the same as the name of the robot connected in Mech-Center. |