Adjust Poses to Point Cloud Surface
Function
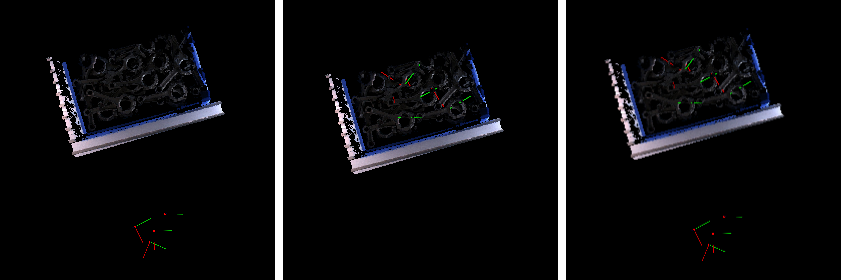
This Step translates the input poses along the specified directions so that the centers of the translated poses are on the surfaces of the input point clouds.
Input and Output
Parameter Description
Visualization Settings
| Parameter | Description
|
|---|---|
Pose Type to Visualize |
Description: This parameter is used to select the pose type to visualize.
|
Usage Setting of Inputs
| Parameter | Description |
|---|---|
Mapping Type |
Parameter description: Specifies the correspondence relationship between the input point clouds and the input poses. Value list:
Default value: OneToOne |
Coordinate System Settings
| Parameter | Description |
|---|---|
Coordinate Type |
Parameter description: Specifies the coordinate system to use when adjusting the poses. Value list:
Default value: Object Frame |
Point Cloud Range Settings
| Parameter | Description |
|---|---|
Extract Point Cloud Method |
Parameter description: Specifies the method for extracting surface point clouds. Value list:
Default value: PointsInsideCylinder |
Adjust Method Settings
| Parameter | Description |
|---|---|
Adjust Method |
Parameter description: Specifies the method for adjusting the poses. Value list:
Default value: MoveACertainDisAlongZAxis |