工件旋转对称
本文介绍工件的旋转对称性。
简介
| 本文中提到的“对称性”均指“旋转对称性”。 |
工件对称性反映了工件绕其对称轴旋转一定角度后外形可以与旋转前重合的特性。
当工件存在对称性时,用户可以在工件库中设置工件的对称性相关参数。
当路径点的目标类型为工件位姿时,配置工件对称性可减少机器人持有工件过程中末端工具的旋转,提高路径规划的成功率,减少路径规划时间,使机器人抓取动作更加流畅、快捷。








对称次数
如果工件绕其对称轴旋转一定角度后(a°)外形可以与旋转前重合,对称次数 = 360°/a° 。
常见的长方形纸箱对称次数为2,三棱柱对称次数为3,圆柱体对称次数为正无穷。
 |
 |
 |
 |
|---|---|---|---|
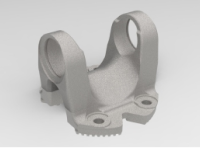
对称次数 = 2 |
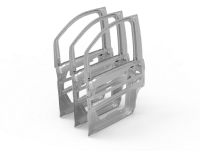
对称次数 = 4 |
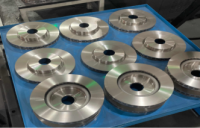
对称次数 = 9 |
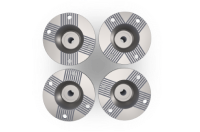
圆对称 |
