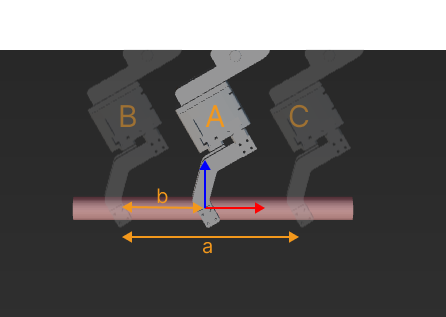
平移裕度 您正在查看最新版本(V2.1.0)的文档。如果您想查阅其他版本的文档,可以点击页面右上角“切换版本”按钮进行切换。 ■ 如果您不确定当前使用的产品是哪个版本,请随时联系梅卡曼德技术支持。 本文介绍基于抓取点的平移裕度。 简介 基于部分抓取点抓取时,末端工具的抓取姿态可以沿抓取点的X轴或Y轴方向进行一定程度的平移,该平移范围即平移裕度。通过设置平移裕度,机器人可以主动利用这样的“可容许偏差”来避免碰撞等问题。 尝试范围与尝试间隔 尝试范围为抓取位姿与视觉位姿偏移距离的最大允许范围(下图所示a即为尝试范围)。 尝试间隔为每隔多少距离尝试一次抓取(下图所示b即为尝试间隔)。 A为末端工具在抓取点的抓取姿态,B、C为在尝试范围边界的抓取姿态。 尝试次数 尝试次数根据尝试范围和尝试间隔自动计算。 假设尝试间隔为 5mm,尝试范围为 ±10mm,则:单边范围内的尝试次数为 10/5 = 2,即 2 次(分别出现在5mm和10mm)。 总尝试次数 = 1+2*2 = 5 次,(-10、-5、0、5、10)。 工件旋转对称 旋转裕度