표준 인터페이스 명령어
사용자가 사용할 수 있는 표준 인터페이스 컴포넌트는 총 6개입니다.
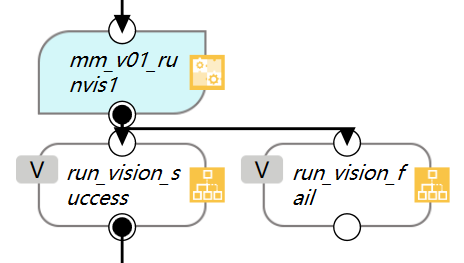
Mech-Vision(Run Vision) 트리거하기
이 컴포넌트는 Mech-Vision 프로젝트를 트리거하는 데 사용됩니다.
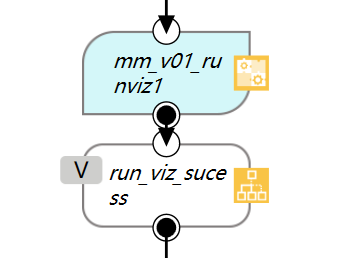
Mech-Viz(Run Viz)를 트리거하기
이 컴포넌트는 Mech-Viz 프로젝트를 트리거하는 데 사용됩니다.
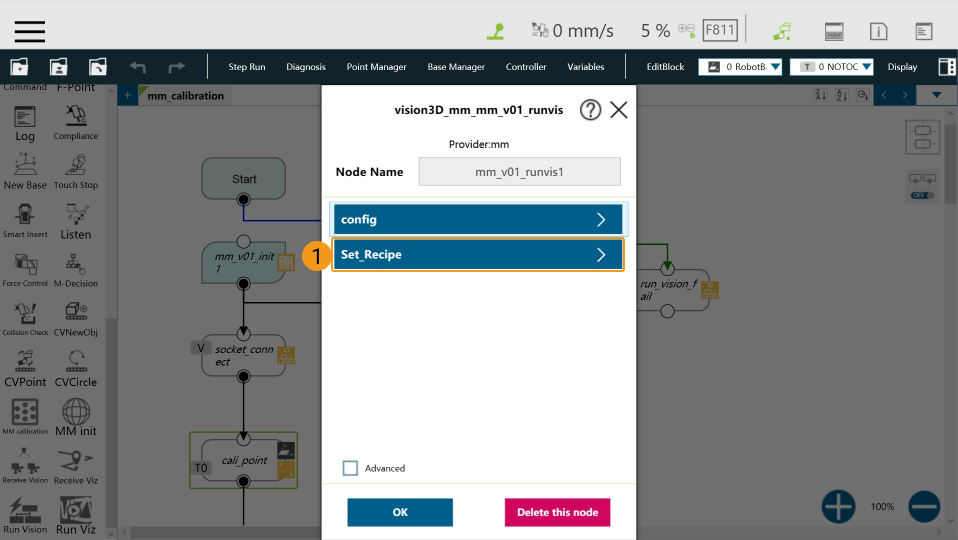
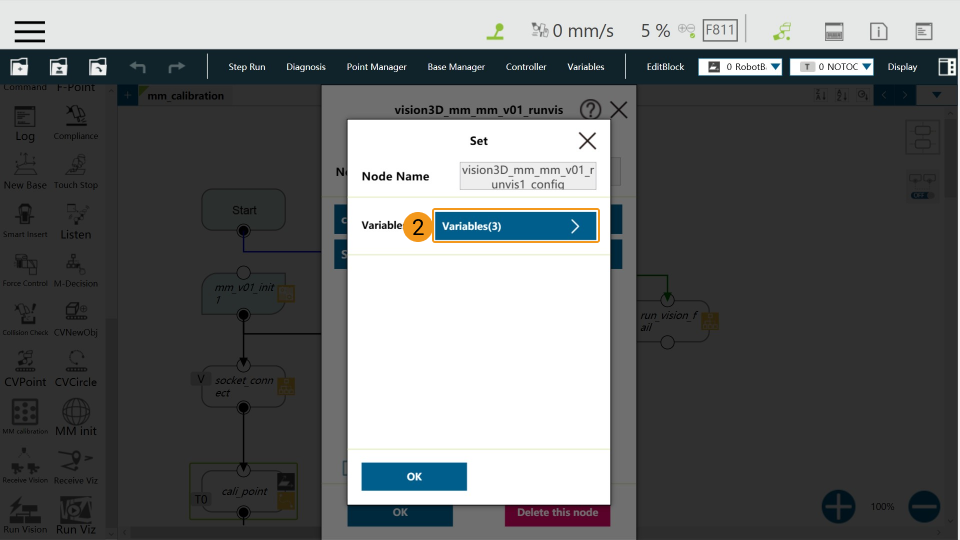
구성 가능한 파라미터
-
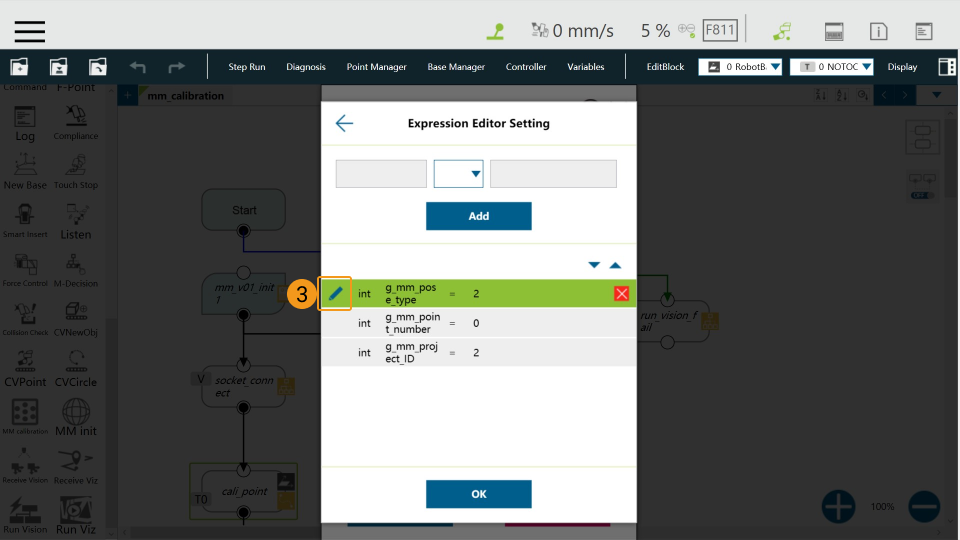
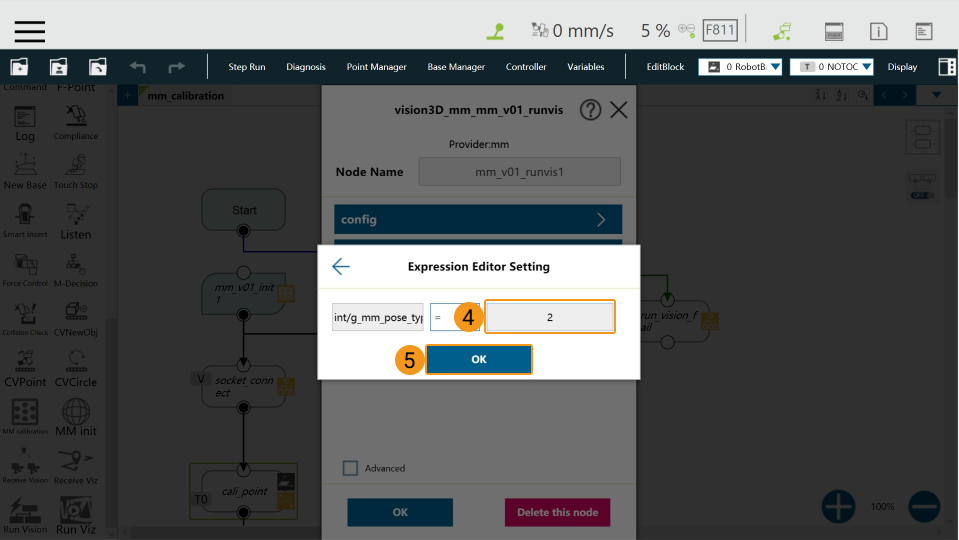
Config
-
g_mm_runviz_pose_type : 로봇 포즈 유형입니다. 값은 반드시 1이어야 하며, 이는 관절 각도 유형을 의미합니다
-
g_whether_after_161 : Mech-Vision과 Mech-Viz 소프트웨어 버전이 1.6.1 이후인지 여부입니다. true는 예, false는 아니오를 의미합니다
-
-
Set_Branch
-
g_mm_whether_set_branch : 분기 설정 여부. true는 분기 설정이 필요함, false는 분기 설정이 필요 없음을 의미합니다
-
g_mm_branch_task_ID : 분기 스텝 ID
-
g_mm_branch_out_port : 분기 아웃 포트 번호
-
-
Set_Index
-
g_mm_whether_set_index : 인덱스 설정 여부. true는 인덱스 설정이 필요함, false는 인덱스 설정이 필요 없음을 의미합니다
-
g_mm_index_task_ID : 분기 스텝 이름
-
g_mm_index_value : 인덱스 값
-
비전 결과 획득하기(Receive Vision)
이 컴포넌트는 Mech-Vision를 트리거한 뒤 Mech-Vision 결과를 획득하는 데 사용됩니다. 아웃 포트 분기는 비전 결과의 상태 코드를 기준으로 판단됩니다.
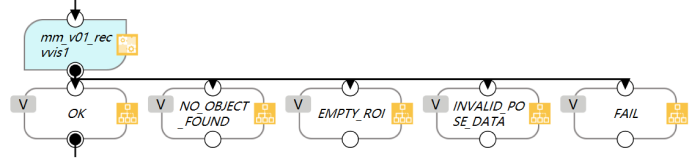
이 컴포넌트 실행이 완료되면 Mech-Vision에서 반환된 결과는 문자열 배열(string[]) 형태로 전역 변수 g_mm_socket_recv_array에 저장됩니다. 사용자는 해당 변수 데이터를 필요에 따라 처리할 수 있습니다.
아웃 포트에 대응하는 상태 코드는 다음과 같습니다.
-
NO_OBJECT_FOUND : 1002
-
EMPTY_ROI : 1003
-
INVALID_POSE_DATA : 1006
계획 경로를 획득하기(Receive Viz)
이 컴포넌트는 Mech-Viz를 트리거한 후 Mech-Viz의 계획 경로를 획득하는 데 사용됩니다.
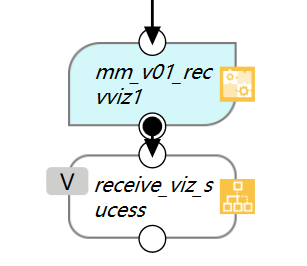
이 컴포넌트 실행이 완료되면 Mech-Viz에서 반환된 모든 결과는 문자열 배열(string[]) 형태로 전역 변수 g_mm_socket_recv_array에 저장됩니다. 사용자는 해당 변수 데이터를 필요에 따라 처리할 수 있습니다.
모든 위치 포인트는 문자열 배열(string[]) 형태로 전역 변수 g_mm_total_point에 저장됩니다. 배열의 처음 6개 요소는 첫 번째 계획 지점이고, 7번째부터 12번째 요소는 두 번째 계획 지점이며, 이후에도 6개 요소 단위로 계획 지점이 하나씩 증가합니다.
또한 이 컴포넌트는 계획 궤적 획득 트리거 횟수를 기록하는 정수형(int) 변수 g_mm_recv_viz_time을 제공합니다. 이 변수는 0부터 시작하며, 1회 트리거 시 값은 0입니다. 궤적 계획 획득이 2회 트리거되면 이 변수 값은 1이 됩니다.
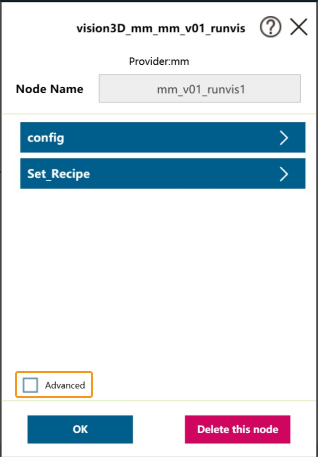
주의사항
좌측 기능 패널에서 끌어온 컴포넌트(init 제외)는 모두 컴포넌트 좌측 상단의  을 클릭한 후 팝업 창에서 Advanced*를 선택해야 합니다. *send 및 *recv*가 포함된 변수의 네트워크 장치는 init으로 생성된 네트워크 장치로 선택해야 하며, 모든 컴포넌트의 네트워크 장치를 동일하게 유지해야 합니다.
을 클릭한 후 팝업 창에서 Advanced*를 선택해야 합니다. *send 및 *recv*가 포함된 변수의 네트워크 장치는 init으로 생성된 네트워크 장치로 선택해야 하며, 모든 컴포넌트의 네트워크 장치를 동일하게 유지해야 합니다.