샘플 프로그램18: MM_S18_Viz_GetUserData
프로그램 소개
기능 설명 |
로봇은 피킹 경로를 얻을 때 동시에 Mech-Vision 프로젝트에서 출력된 사용자 정의 데이터를 획득합니다. |
파일 경로 |
Mech-Vision 및 Mech-Viz의 설치 디렉터리로 이동하여 |
필요한 프로젝트 |
Mech-Vision 프로젝트 (하나 이상의 사용자 정의 포트를 출력 스텝에 추가해야 합니다) 및 Mech-Viz 프로젝트 (말단장치 유형은 디팔레타이징 진공 그리퍼입니다). |
사용 전제 조건 |
|
| 이 샘플 프로그램은 참고용으로 제공됩니다. 사용자는 실제 상황에 맞춰 이 내용을 바탕으로 수정해야 하며, 해당 프로그램을 그대로 사용하지 않도록 하십시오. |
프로그램 설명
다음은 MM_S18_Viz_GetUserData 샘플 프로그램의 코드와 관련 설명입니다.
| MM_S15_Viz_GetDoList 샘플과 비교하면, 이 샘플은 아래와 같이 굵게 표시된 코드 부분만 수정되었습니다. 따라서 MM_S15_Viz_GetDoList와 일치하는 부분은 다시 설명하지 않습니다(일치하는 부분에 대한 정보는 MM_S15_Viz_GetDoList 샘플 프로그램 설명을 참조하십시오). |
NOP
'--------------------------------
'FUNCTION: trigger Mech-Viz
'project, then get planned path
'and get custom data from
'Mech-Vision using command 210
'Mech-Mind, 2023-12-25
'--------------------------------
'clear I50 to I69
CLEAR I050 20
'initialize p variables
SUB P071 P071
SUB P072 P072
SUB P073 P073
'move to robot home position
MOVJ C00000 VJ=50.00
'initialize communication
'parameters (initialization is
'required only once)
CALL JOB:MM_INIT_SOCKET ARGF"192.168.170.22;50000;1"
'move to image-capturing position
MOVJ C00001 VJ=50.00 PL=0
'open socket connection
CALL JOB:MM_OPEN_SOCKET
'trigger Mech-Viz project
CALL JOB:MM_START_VIZ ARGF"2;30;80"
IFTHENEXP I080<>2103
'add error handling logic here
PAUSE
ENDIF
'get planned path
CALL JOB:MM_GET_PLANDATA ARGF"0;3;51;52;53"
'check whether planned path has
'been got from Mech-Viz
'successfully
IFTHENEXP I053<>2100
'add error handling logic here
'according to different error
'codes
'e.g.: I053=2038 means no
'point cloud in ROI
PAUSE
ENDIF
'get gripper control signal list
CALL JOB:MM_GET_DOLIST ARGF"0;0;80"
IFTHENEXP I080<>2102
'add error handling logic here
PAUSE
ENDIF
'close socket connection
CALL JOB:MM_CLOSE_SOCKET
'save waypoints of the planned
'path to local variables one
'by one
CALL JOB:MM_GET_PLANPOSE ARGF"1;71;61;31"
CALL JOB:MM_GET_PLANPOSE ARGF"2;72;71;31"
CALL JOB:MM_GET_PLANPOSE ARGF"3;73;81;31"
'received custom data is saved
'from R052
'R052 = offset_x;
'R053 = offset_y;
'R054 = offset_z;
SET R010 R052
SET R011 R053
SET R012 R054
'follow the planned path to pick
'move to approach waypoint of
'picking
MOVJ P071 VJ=50.00 PL=0
'move to picking waypoint
MOVJ P072 VJ=10.00 PL=0
'set gripper control signal when
'current waypoint is picking
'waypoint
CALL JOB:MM_SET_DOLIST ARGF"0"
PAUSE
'move to departure waypoint of
'picking
MOVJ P073 VJ=50.00 PL=0
'move to intermediate waypoint of
'placing
MOVJ C00002 VJ=50.00
'move to approach waypoint of
'placing
MOVL C00003 V=166.6 PL=0
'move to placing waypoint
MOVL C00004 V=50.0 PL=0
'add object releasing logic here,
'such as DOUT OT#(1) OFF
PAUSE
'move to departure waypoint of
'placing
MOVL C00005 V=166.6 PL=0
'move back to robot home position
MOVJ C00006 VJ=50.00
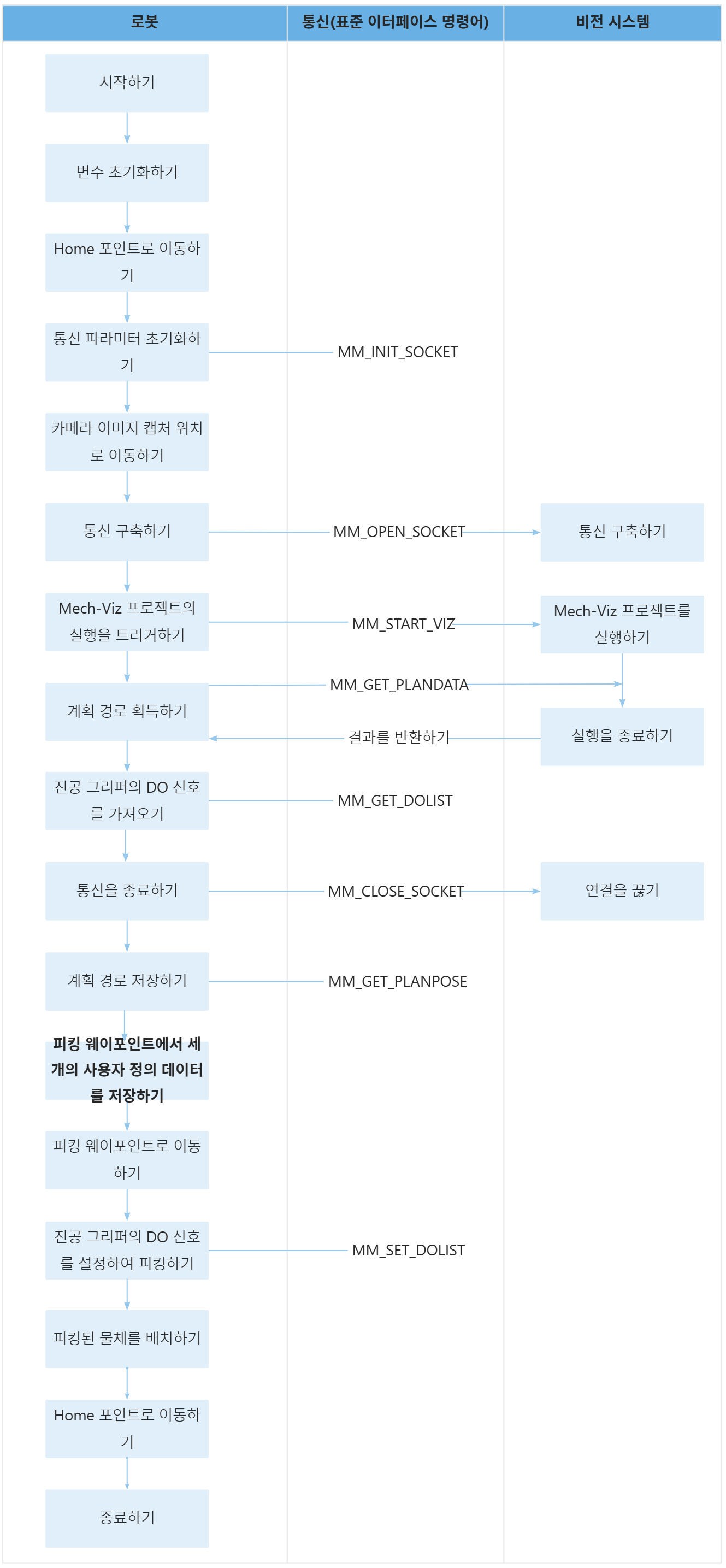
END위 샘플 프로그램 코드에 해당하는 워크플로는 아래 그림에 표시되어 있습니다.
아래 표는 새롭게 추가된 코드의 설명입니다. 명령어 이름의 링크를 클릭하면 해당 명령의 상세 설명을 확인할 수 있습니다.
| 워크플로 | 코드와 설명 | ||||
|---|---|---|---|---|---|
웨이 포인트의 사용자 정의 데이터를 저장하기 |
로봇은 MM_GET_PLANDATA 명령어를 실행하여 웨이 포인트의 비전 이동 계획 결과와 사용자 정의 데이터를 얻고, 그 후 MM_GET_PLANPOSE 명령어를 실행하여 웨이 포인트의 비전 이동 계획 결과를 R031~R051에 순차적으로 저장하고, 사용자 정의 데이터는 번호 52부터 시작하는 R 변수에 순차적으로 저장합니다. 위 코드는 비전 이동 웨이 포인트(피킹 웨이 포인트)의 세 가지 사용자 정의 데이터 R052, R053, R054를 각각 R010, R011, R012로 할당하는 것을 나타냅니다.
|