통신 방식 선택
실제 배포에서 일반적으로 프로젝트의 통신 대상(로봇 또는 PLC) 및 프로젝트 요구 사항(통신 프로토콜, 기능 요구 사항, 프로세스 복잡성 등)을 수집한 다음 통신 방식을 결정합니다. 프로젝트 요구 사항에 따라 사용할 통신 방식을 결정할 수 없는 경우 Mech-Mind 기술 지원 팀에 문의하여 도움을 받으십시오.
-
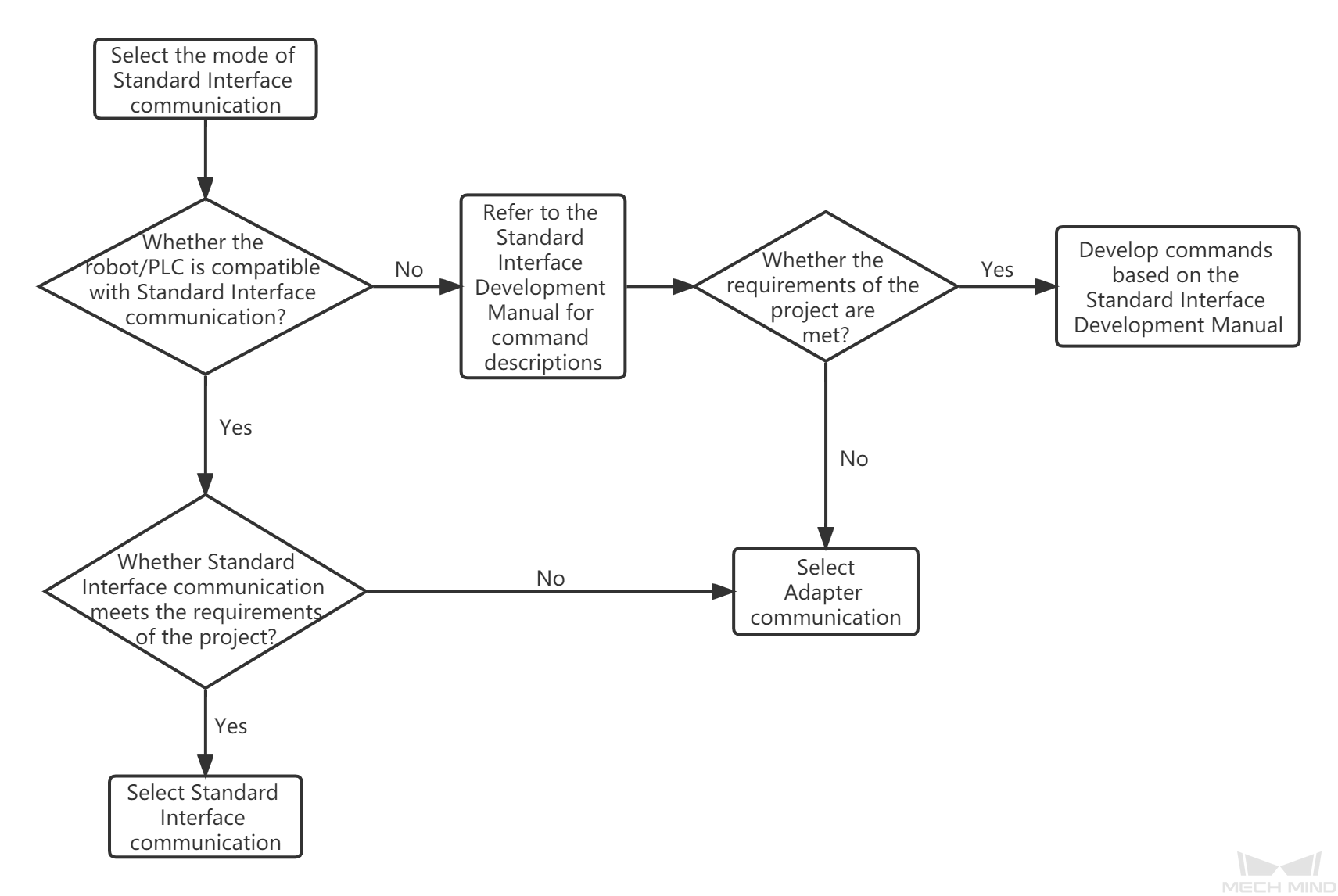
인터페이스 통신 방식을 사용하기로 선택한 경우 아래 그림을 참조하여 실제 프로젝트 요구 사항에 따라 선택하십시오.
-
각 로봇이나 PLC의 표준 인터페이스 통신 지원 현황은 표준 인터페이스 통신 일람표를 참조하십시오.
-
표준 인터페이스에서 지원하는 기능 및 개발 지침은 표준 인터페이스 개발자 매뉴얼에서 확인할 수 있습니다.
-
Adapter에서 지원하는 기능 및 프로그래밍 지침에 대한 자세한 내용은 Adapter 통신에서 확인할 수 있습니다.
-
-
마스터 컨트롤 통신 방식을 사용하기로 선택한 경우 아래 그림을 참조하여 실제 프로젝트 요구 사항에 따라 선택하십시오.
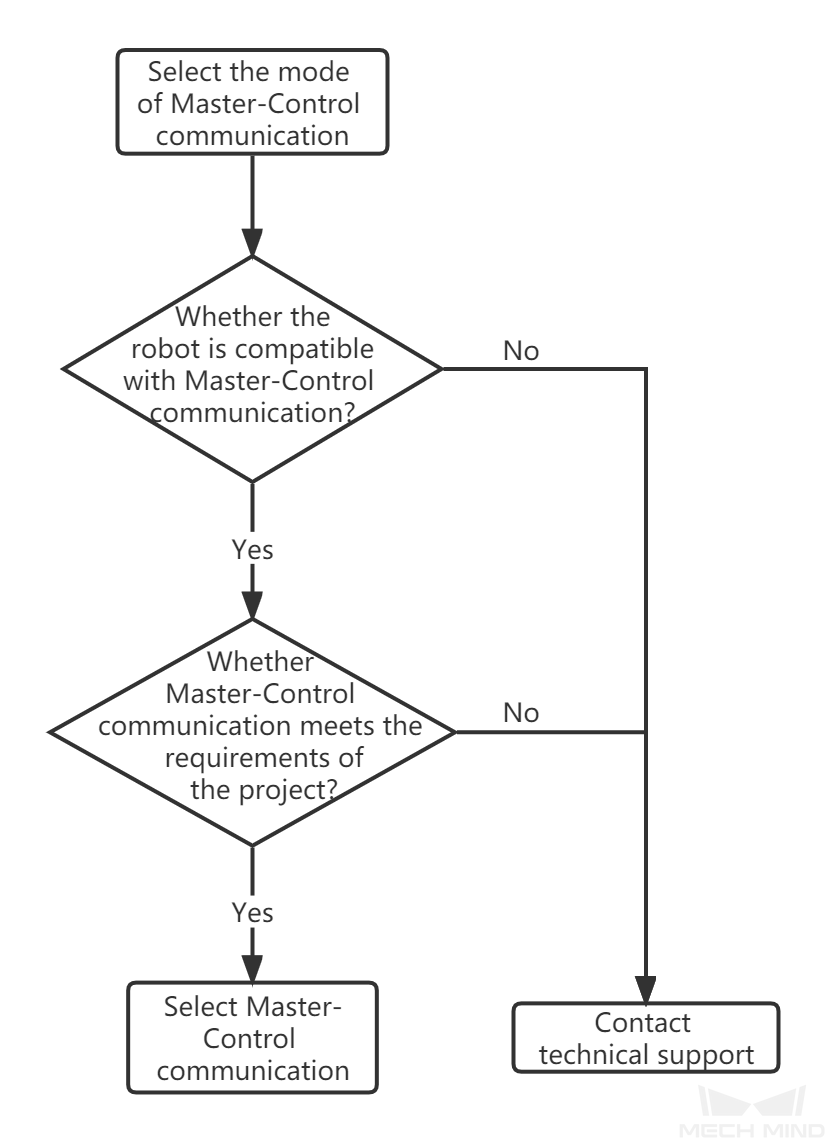
각 로봇의 마스터 컨트롤 통신 지원 현황은 마스터 컨트롤 통신 일람표를 참조하십시오.